———————————————————————————————————————
The 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII 2021) is organized by Beijing Institute of Technology and Beijing Association of Automation, Beijing, P. R. China. It will be held at Beijing Institute of Technology, Beijing, during Oct. 31-Nov. 3, 2021. IWACIII 2021 is an international conference that provides a forum for scientists and engineers over the world to present their own theoretical results and techniques in the field of computational intelligence and intelligent informatics. Selected excellent papers will be published in the special issue of JACIII (Journal of Advanced Computational Intelligence and Intelligent Informatics, ESCI/SCOPUS/EI indexed). Taking this opportunity, we sincerely welcome our colleagues worldwide to join us for this workshop.
----------------------------------------------------------------------------------------------------------------------------------
Publication Ethics and Publication Malpractice Statement
It is necessary to agree upon standards of expected ethical behavior for all parties involved in the act of publishing (authors, editors, peer reviewers, publisher). IWACIII 2021 ethic statements are based on the guidelines and standards developed and published by the Committee on Publication Ethics (COPE).
Editors
1. IWACIII 2021 editor is responsible for deciding which of the articles submitted to the conference should be published.
2. IWACIII 2021 editor will accept and evaluate manuscripts for their intellectual content regardless of race, gender, nationality, ethics origin, political philosophy, religious belief or sexual orientation of the authors.
3. Editors must not disclose any information about a submitted manuscript to anyone other than stakeholders.
4. Unpublished manuscripts or materials must not be used in an editors own research.
Authors
1. Authors attest that paper is their own, original and unpublished work.
2. Authors guarantee that the manuscript has not been copied or plagiarized (in whole or in part); a paper should contain sufficient details and references to permit others to replicate the work; any used information resources (phrases, data, images…) must be appropriately cited or quoted.
3. Authorship should be limited to those who have made a significant contribution to the manuscript content. All those who made significant contribution should be listed as co-authors.
4. Affiliation (all authors/co-authors) and corresponding address (main author) must be clearly stated.
5. When authors discover a significant error or inaccuracy in theirown published work, it is the authors' obligation to promptly notify the Publisher and cooperate with the editor to retract or correct the paper.
Call for Papers
Part 1: General Sessions ⇒
Part 2: Organized Session 1 ⇒
Part 3: Organized Session 2 ⇒
--------------------------------------------------------------------------------------------------------------------------------
IWACIII 2021 Call for Papers http://iwaciii2021.bit.edu.cn
The 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics
Beijing China, Oct. 31-Nov. 3, 2021
The 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII 2021) is organized by Beijing Institute of Technology and Beijing Association of Automation, Beijing, P. R. China. IWACIII 2021 is an international conference that provides a forum for scientists and engineers over the world to present their own theoretical results and techniques in the field of computational intelligence and intelligent informatics. Selected excellent papers will be published in the special issue of JACIII (Journal of Advanced Computational Intelligence and Intelligent Informatics, ESCI/SCOPUS/EI indexed). Taking this opportunity, we sincerely welcome our colleagues worldwide to join us for this workshop. The document of the CFP can be downloaded by clicking on the link: CFP.
Sponsors: ![]()
Beijing Institute of Technology (BIT),
Beijing Association of Automation (BAA),
IEEE Computational Intelligence Society (Beijing Chapter),
International Fuzzy Systems Association (IFSA),
Japan Society for Fuzzy Theory and Intelligent Informatics (SOFT),
IEEE-IES Technical Commitee of Human Factors,
IEEE Systems, Man, and Cybernetics Society (Beijing Capital Region Chapter),
IEEE Control Systems Society (Beijing Chapter)
Co-sponsors:
Fuji Technology Press Ltd.
Chinese Society of Educational Development Strategy
KTI Semiconductor Manufacturing Machine Co. Ltd.







![]()
![]()

![]()
----------------------------------------------------------------------------------------------------------------------------------------------
Call for Organized Session of IWACIII 2021
The 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII 2021)
Oct. 31-Nov. 3, 2021, Beijing, China
https://iwaciii2021.bit.edu.cn
Proposal Deadline : Aug. 1, 2021
About Organizing Session
We invite proposals for organized session of the 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII 2021). Each Organized Session should include five presentations in principle. Registration fee for the session organizer will be discounted to free-of-charge in order to encourage session organization. Note that the discount will be applied only for one Principal Organizer (or one specified participant) for each organized session. Session Organizer will submit the proposal of own organized session in the format below, until the proposal deadline, Aug. 1, 2021, via e-mail (as details in below).
Proposal Format
(1) Title of the Organized Session
(2) Principal Organizer Information
Name / Affiliation / E-mail
(3) Co-organizers' Information (if any)
Names / Affiliations / E-mails
(4) List of Expected Presentations (5 presentations in principle)
List of speakers with their names, affiliations, and tentative titles or topics.
(5) Session Description (if any)
To Submit Organized Session Proposal
Send your proposal via e-mail to the address below with the subject specified below.
E-mail: youshida.shinichi@kochi-tech.ac.jp
Subject: OS Proposal for IWACIII 2021
Contact addresses for Organized Session:
Organized Session Chair
Shinichi Yoshida(Kochi University of Technology), E-mail: youshida.shinichi@kochi-tech.ac.jp
------------------------------------------------------------------------------------------------------------------------------------------------------------------------
IWACIII 2021 征求专题研讨分论坛
The 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII 2021), Oct. 31-Nov. 3, 2021, Beijing, China
第七届先进计算智能与智能信息处理国际研讨会
分论坛申请截稿日期: 2021年8月1日
关于专题研讨分论坛
在第七届先进计算智能与智能信息处理国际研讨会上,我们邀请专家学者组织专题研讨分论坛,每个专题研讨分论坛需要有5篇发表论文。作为鼓励机制,一个专题研讨分论坛中,可以为一名主要会议组织人免去论文注册费。专题研讨分论坛组织人请按照下面的格式,在2021年8月1日之前,通过电子邮件提交专题研讨分论坛中所有的论文。
提交的专题研讨分论坛的格式:
专题研讨分论坛的主题
专题研讨分论坛主要组织人的信息
姓名/单位/电子邮箱
专题研讨分论坛联合组织人的信息(如果有的话)
姓名/单位/电子邮箱
期望会议发表的论文目录(原则上5篇论文)
专题研讨分论坛介绍(如果有的话)
关于提交专题研讨分论坛申请
如果您有意组织专题研讨分论坛,请把您准备组织的专题研讨分论坛信息提交给下面的邮箱:
Email: zeng@bit.edu.cn
邮件主题词:组织IWACIII 2021专题研讨分论坛申请
重要日期:
专题研讨分论坛申请(包括所有论文的基本信息)的截稿日期: 2021年6月1日 2021年7月1日 2021年8月1日
专题研讨分论坛论文的截稿日期: 2021年6月1日 2021年7月1日 2021年8月1日
最终交稿日期:2021年8月1日
关于申请专题研讨分论坛的详情可以联系:
曾祥远 (北京理工大学), Email: zeng@bit.edu.cn, Tel: 13426012719
Paper Submission Deadline ------------------------ July 1, 2021 July 15, 2021 Aug. 1, 2021
Notification of Acceptance ------------------------ July 15, 2021 July 30, 2021 Aug. 15, 2021
Final Camera-Ready Paper Due ------------------------ August 1, 2021 August 15, 2021 Aug. 31, 2021
Conference Period ------------------------ Oct. 31-Nov. 3, 2021
Deadline of Organized Session Proposal: July 15, 2021 Aug. 1, 2021
Paper Submission Deadline for Organized Session: July 15, 2021 Aug. 1, 2021
Honorary Chair
Kaoru Hirota (BIT, China; Tokyo Tech., Japan)
General Chairs Advisory Board
Hongbin Ma(BIT, China) Yaping Dai (BIT, China)
Naoyuki Kubota (TMU, Japan) Toshio Fukuda (Meijyo Univ., Japan)
Program Committee Chairs Organized Committee Chairs
Bin Xin (BIT, China) Dawei Shi (BIT, China)
Jinhua She (TUT, Japan) Xiangyuan Zeng (BIT, China)
Shinichi Yoshida ( KUT, Japan)
Publication Chairs Publicity Chairs
Huifang Li (BIT, China) Takenori Obo (TPU, Japan)
Zhiyang Jia (BIT, China) Qing Wang (BIT, China)
Local Organizing Chairs Registration Chairs
Yuan Li (BIT, China) Ru Lai (BIT, China)
Zhen Li (BIT, China) Zhuoyue Song (BIT, China)
General Affairs
Rongli Li (BIT, China)
Program Committee Members
Y. Q. Bai, T. Cai, C. Chen, J. Chen, K. Chen, L. Chen, S. Chen, W. J. Chen, X. Chen, E. Dadios, Y. Dai, J. Dan, F. Dong, H. Dong, H. Fang, Z. Feng, K. Fujimoto, E. F.Fukushima, T. Furuhashi, K. Galkowski, M. G. Gan, Z. Geng, T. Hashimoto, Y. Hatakeyama, X. He, Y. Ho, Y. Horiguchi, Y. Hoshino, N. Ikoma, A. M. Iliyasu, M. Inuiguchi, H.Ishibuchi, H.Iyatomi, Z. Y. Jia, J. Kacprzyk, K. Kawamoto, S. Kawata, A. Kecskemethy, D. Kim, S. Kobashi, I. Koboyashi, L. T. Koczy, N. Kubota, K. Kurashige, R. Lai, C. Li,H. Li, X. Li, Y. Li, Z. Li, X. Liao, B. Liu, G. Liu, X. Liu, Z. Liu, P. Lu, Z. Luo, H. Ma, H. Masuta, Y. Matsuo, M. Moniwa, Y. Nakagawa, Y. Nakanishi, K. Nitta, H. Nobuhara, Y.Nojima, C. N. Nyirenda, T. Ohkubo, K. Ohnishi, S. Ohno, H. Ohtake, K. Okamoto, I. Ono, F. Pan, G. Park, W. Pedrycz, Q. Pan, Z. Peng, N. H. Phuong, A. Ralescu, D.Ralescu,X. Ren, I. J. Rudas, H. Sakaniwa, H. Seki, J. She, D. Shi, A. Shibata, T. Shibata, E. Shimokawara, Z. Song, J. W. Spencer, W. Su, J. Sun, K. Tachibana, H. Takahashi, T. Terano,Y. Takama, K. Uehara, Y. Ueno, G. Vachkov, J. Wang, L. Wang, Q. Wang, Y. Wang, K. Wong, M. Wu, Q. Wu, Y. Wu, Y. Xia, B. Xin, X. Xin, Y. Xiong, B. Xu, L. Xu, Y. Xu, T.Yamaguchi, T. Yamanoi, T. Yamashita, Y. Yamazaki, F. Yan, J. Yi, R. Yokoyama, K. Yoshida, S. Yoshida, T. Yoshikawa, H. Yu, L. Yu, X. Y. Zeng, C. Zhang, Y. Zhang, X. Zhao,D. Zhao, J. Zhou, G. Zhu, Q. Zhu
Lei Guo
National Center for Mathematics and Interdisciplinary Sciences, Chinese Academy of Sciences (CAS)

Title: Towards Understanding Game-Based Control Systems
Abstract: In the traditional framework of control theory, the plant to be controlled usually does not have its own payoff function, however, this is not the case for the control or regulation of many practical systems such as social and economic systems of interests, where the systems or subsystems to be regulated may have their own objectives which may not be the same as that of the global regulator or controller, and we call such hierarchical decision making systems as game-based control systems (GBCS). This lecture will expound the backgrounds of introducing GBCS and present some preliminary results for a basic class of GBCS. It will be shown how the macro-states of the GBCS may be regulated by intervening in the Nash equilibrium that is reached at the micro-level. In particular, we will provide some results on controllability and stabilizability of both deterministic and stochastic linear GBCS with multi-players at the micro-level, and both cases involve the analysis and control of forward-backward (stochastic) differential equations.
Bio: Dr. Lei Guo received his B.S. degree in mathematics from Shandong University in 1982, and Ph.D. degree in control theory from the Chinese Academy of Sciences in 1987. He was a postdoctoral fellow at the Australian National University (1987-1989). Since 1992, he has been a Professor of the Institute of Systems Science at the Chinese Academy of Sciences (CAS), where he had been Director of the Institute (1999-2002). From 2002 to 2012,he was the President of the Academy of Mathematics and Systems Science, CAS. He is currently the Director of the National Center for Mathematics and Interdisciplinary Sciences, CAS.
Dr. Guo was elected Fellow of the IEEE in 1998, Member of the Chinese Academy of Sciences in 2001, Fellow of the Academy of Sciences for the Developing World (TWAS) in 2002, Foreign Member of the Royal Swedish Academy of Engineering Sciences in 2007, and Fellow of the International Federation of Automatic Control (IFAC) in 2007 "for fundamental contributions to the theory of adaptive control and estimation of stochastic systems, and to the understanding of the maximum capability of feedback". In 2014, he was awarded an honorary doctorate by Royal Institute of Technology (KTH), Sweden.
Takao Terano
Chiba University of Commerce, Japan

Title: Understanding Complex Social-Technical Systems through Agent and Gaming Simulation
Abstract: Agent-Simulation is a tool to know about a could-be-world. Also, Gaming-Simulation is a language to communicate the future. In this talk, I will discuss a new approach to understand complex socio-technical systems through both concepts. We start basic features on complex and/or complicated socio-technical systems, which address both technical and social issues with human decision- making processes. Then, we explain the importance of new ways of system thinking with human-in-the-loop manners. For the purpose, we propose a methodology to amalgamate agent- and gaming-simulation.
Bio: Dr. Terano is a professor of Platform for Liberal Arts and Sciences, Chiba University of Commerce. He received BA degree in Mathematical Engineering in 1976, and M. A. degree in Information Engineering in 1978 both from University of Tokyo, and Doctor of Engineering Degree in 1991 from Tokyo Institute of Technology. His interests include agent-based Modeling, Knowledge Systems, Evolutionary Computation, and Service Science. He is a member of the editorial board of major Artificial Intelligence- and System science- related academic societies in Japan and a member of IEEE, and the president of PAAA.
Zeng-Guang Hou
Institute of Automation, Chinese Academy of Sciences

Title: Enhancement of Engagement for Active Control of Rehabilitation Robot
Abstract: Rehabilitation training is a continuous while tedious process which causes slackness of patients. Engagement or active training of stroke patients helps to increase the neural activities of the cerebral cortex, and thus promotes neuroplasticity. In this talk, we discuss the challenges and possible solutions to enhance the engagement of patients in the process of rehabilitation training.
Bio: Dr. Hou is a Professor and Deputy Director of the State Key Laboratory of Management and Control for Complex Systems, Institute of Automation, Chinese Academy of Sciences (CAS). He is an IEEE/CAA Fellow, a VP of the Chinese Association of Automation (CAA) and the Asia Pacific Neural Network Society (APNNS), and a member of Board of Governors of International Neural Network Society (INNS). He is an Associate Editor of the IEEE Transactions on Cybernetics and the Neural Networks, a recipient of IEEE Transactions on Neural Networks Outstanding Paper Award in 2013, and the National Natural Science Award of China, and the Outstanding Achievement Award of Asia Pacific Neural Network Society (APNNS) in 2017.
Zhaohui Zhang
University of Science and Technology Beijing, China

Title: Online Measurement Techniques of Multi-quantities in an Electrolysing Cell
Abstract:
Bio: Dr. Zhang is a professor with Automation and Electrical Engineering School, University of Science and Technology Beijing. He is also a distinguished teacher of Beijing, director of Beijing Engineering Research Center of Industrial Spectrum Imaging and vice-director of Beijing Association of Automation. The research papers were contributed by his group in Journal of Applied Spectroscopy, Applied Optics, Optical and Quantum Electronics, Chinese Optics Letters, Spectroscopy and Spectral Analysis, Infrared Millimeter and Terahertz Waves, Biophysical Journal, etc. He was selected as Chinese Most Cited Researchers in 2014,2015 and 2016. His current research interests include industrial online measurements and artificial sensing.
University of Surrey, Guildford, UK

Title: Multi-Objective Evolutionary Federated Neural Architecture Search
Abstract: Federated learning is a privacy-preserving machine learning paradigm. In this talk, I am going to introduce a multi-objective approach to enhancing the performance of federated learning in terms of accuracy, communication efficiency and computational complexity. I'll start with a brief introduction to multi-objective machine learning, followed by two evolutionary multi-objective federated learning algorithms for optimizing the architecture of neural network models in federated learning, one for offline, and the other for real-time purposes. Finally, remaining research challenges will be outlined.
Bio: Yaochu Jin received the BSc, MSc, and PhD degrees from Zhejiang University, Hangzhou, China, in 1988, 1991, and 1996, respectively, and the Dr.-Ing. degree from Ruhr University Bochum, Germany, in 2001.
He is currently a Distinguished Chair, Professor in Computational Intelligence, Department of Computer Science, University of Surrey, Guildford, U.K., where he heads the Nature Inspired Computing and Engineering Group. He was a “Finland Distinguished Professor” of University of Jyvaskyla, Finland, a “Changjiang Distinguished Visiting Professor”, Northeastern University, China, and “Distinguished Visiting Scholar”, University of Technology Sydney, Australia. In 2021, he was awarded the Alexander von Humboldt Professorship for Artificial Intelligence by the Federal Ministry of Education and Research of Germany. His main research interests include data-driven surrogate-assisted evolutionary optimization, trustworthy machine learning, multi-objective evolutionary learning, swarm robotics, and evolutionary developmental systems.
Dr Jin is presently the Editor-in-Chief of the IEEE TRANSACTIONS ON COGNITIVE AND DEVELOPMENTAL SYSTEMS and the Editor-in-Chief of Complex & Intelligent Systems. He was an IEEE Distinguished Lecturer, and Vice President of the IEEE Computational Intelligence Society. He is the recipient of the 2018 and 2020 IEEE Transactions on Evolutionary Computation Outstanding Paper Award, the 2015, 2017, and 2020 IEEE Computational Intelligence Magazine Outstanding Paper Award, and the Best Paper Award of the 2010 IEEE Symposium on Computational Intelligence in Bioinformatics and Computational Biology. He is recognized as a Highly Cited Researcher 2019 and 2020 by the Web of Science Group. He is a Member of Academia Europaea and Fellow of IEEE.
Daizhan Cheng
Institute of Systems Science, AMSS, Chinese Academy of Sciences

Title: On Dimension-varying Dynamic (Control) Systems
Abstract: Dimension-varying systems exist widely in real world, for instance, docking/undocking of aircrafts, vehicle clutch systems, internet systems, genetic regulatory networks etc. Classical way to deal with dimension-varying process is ``switching", which ignores the transient process of dimension-varying. In this talk we propose an alternative way to formulate the dimension transient process. First, using semi-tensor product, a cross-dimensional inner product is proposed to connect spaces of different dimensions into a path-wise connected space. A fiber-bundle structure is constructed to describe the relationship between original discrete topology and the norm-based topology. Starting from semi-group system (S-system), a new cross-dimensional dynamic (control) system is defined on quotient space. The properties and trajectory calculations are also revealed. Finally, by projecting and lifting, the realization of cross-dimensional dynamic (control) systems on real world is obtained.
Bio: Dr. Daizhan Cheng graduated from Tsinghua University in 1970, received M.S. from Graduate School, Chinese Academy of Sciences in 1981, and Ph.D. from Washington University, St. Louis, in 1985. Since 1990, he is a professor with Institute of Systems Science, AMSS, Chinese Academy of Sciences. He is the author/coauthor of 17 academic books, over 300 Journal Papers and over 170 Conference Papers. He is IEEE Fellow (2006-), IFAC Fellow (2008-). He was member of IEEE CSS Board of Governors (2009, 2015), and IFAC Council Member (2011-2014). He received Second National Natural Science Award of China twice (in 2008 and 2014), Outstanding Science and Technology Achievement Prize of CAS (2015), and the Automatica Best Paper Award (2008-2010), bestowed by IFAC.
He is the founder of the semi-tensor product of matrices.
Yoichiro Maeda
Ritsumeikan University, Japan

Title: Human Symbiotic Systems including Human Intelligence and Artificial Intelligence
Abstract: "Human Symbiotic Systems" (HSS) aims at studying the basic principles and methods of designing intelligent interaction in bidirectional communication based on the effective collaboration and symbiosis between humans and artifacts such as robots, agents, and computers. The research on HSS includes a wide range of topics from a variety of fields such as human-agent interaction, human-machine interface, intelligent robotics, Kansei engineering and so on. I established a special interest group on Human Symbiotic Systems in Japan Society for Fuzzy Theory and Intelligent Informatics (SOFT) in 2007 in order to advance researches in this field.
The soft computing method is a technology that bridges the gap between "intelligent systems" which are based on logic and regularity, and "humans" who have ambiguity and flexibility, and is also a core technology for research on human symbiotic systems. Both "human intelligence" and "artificial intelligence" are superior, but it is necessary to build efficient cooperative systems between them in order to achieve excellent human symbiotic systems in the future. In this talk, I will give an overview of the activities of HSS research group in SOFT, and introduce some of my own previous researches related to human symbiotic systems.
Bio: Dr. Yoichiro Maeda is a professor of College of Information Science and Engineering in Ritsumeikan University. He graduated the master course of the Graduate School of Engineering in Osaka University in 1983. Then he worked in the Central Research Laboratory in Mitsubishi Electric Corporation. Next, he acted the senior researcher of Laboratory for International Fuzzy Engineering Research (LIFE) in 1989 to 1992, and the associate professor of Osaka Electro-Communication University in 1995. And after working as the visiting researcher of University of British Columbia (UBC), Canada in 1999 to 2000, he arrived at the associate professor of Faculty of Engineering in University of Fukui in 2002 and then the professor of Osaka Institute of Technology in 2013, Institute of Technologists in 2015, Ritsumeikan University in 2017. His major research interests are in the Human-Robot interaction based on soft computing methods. He was a chairman of the Special Interest Group on Human Symbiotic Systems (HSS) of the Japan Society for Fuzzy Theory and Intelligent Informatics (SOFT) in 2007 to 2020. Now, he is also a president of the academic society SOFT.
Zhun Fan
Shantou University, Shantou, China

Title: Design Automation of Intelligent Robotic Systems Based on Evolutionary Computation
Abstract: The main reason why the performance of domestic robots is generally difficult to reach the same level of that of foreign countries mainly lies in the lack of systematic continuous optimization and design automation. How to form a framework of design automation of intelligent robotic systems is the main topic of this report. This report will mainly focus on multi-angle modeling methods of intelligent robotic systems, solving intelligent robot optimization problems by combining constrained multi-objective evolutionary algorithms and machine learning methods, and applying design automation methods to develop intelligent robots.
Bio: Zhun Fan received the B.S. and M.S. degrees in control engineering from Huazhong University of Science and Technology, Wuhan, China, in 1995 and 2000, respectively, and the Ph.D. degree in electrical and computer engineering from the Michigan State University, Lansing, MI, USA, in 2004. He is currently a Full Professor with Shantou University (STU), Shantou, China. He also serves as the Head of the Department of Electrical Engineering and the Director of the Guangdong Provincial Key Laboratory of Digital Signal and Image Processing. His major research interests include intelligent control and robotic systems, robot vision and cognition, MEMS, computational intelligence, design automation, optimization of mechatronic systems, machine learning and image processing. He has published more than 190 scientific articles, such as the IEEE Transactions on Image Processing, IEEE Transactions on Evolutionary Computation, IEEE Transactions on Industrial Electronics, and IEEE Transactions on Automation Science and Engineering.
Before joining STU, he was an Associate Professor with the Technical University of Denmark (DTU) from 2007 to 2011, first with the Department of Mechanical Engineering, then with the Department of Management Engineering, and as an Assistant Professor with the Department of Mechanical Engineering in the same university from 2004 to 2007. He has been a Principle Investigator of a number of projects from Danish Research Agency of Science Technology and Innovation and National Natural Science Foundation of China. His research is also supported by the National Natural Science Foundation of China.
Yi Mei
Victoria University of Wellington, New Zealand

Title: Automatic Heuristic Learning for Complex Optimisation Problems with Genetic Programming
Abstract: Many real-world decision making problems are very complex, with large problem size and dynamic environments. It is very hard to design effective decision-making policies/heuristics to make proper decisions. Manually designing such heuristics typical highly rely on domain expertise and requires a lot of trial-and-error. With the recent rapid progress in AI and machine learning, automatic heuristic design becomes a hot topic in both evolutionary computation and machine learning, as well as automated algorithm design. This seminar will introduce how to automatically learn effective decision-making heuristics with Genetic Programming (GP), a powerful evolutionary computation algorithm. The seminar will cover several key design issues, including solution representation, fitness evaluation, selection, as well as more advanced and trendy topics such as surrogate models and knowledge transfer. It will give several real-world optimisation problems as case studies, such as job shop scheduling, vehicle routing, and cloud resource allocation.
Bio: Dr. Yi Mei is a Senior Lecturer at the School of Engineering and Computer Science, Victoria University of Wellington, Wellington, New Zealand. He received his BSc and PhD degrees from University of Science and Technology of China in 2005 and 2010, respectively. His research interests include evolutionary computation in scheduling, routing and combinatorial optimisation, as well as evolutionary machine learning, hyper-heuristics, genetic programming, feature selection and dimensionality reduction.
Yi has more than 130 fully refereed publications, including the top journals in EC and Operations Research (OR) such as IEEE TEVC, IEEE Transactions on Cybernetics, European Journal of Operational Research, ACM Transactions on Mathematical Software, and top EC conferences (GECCO). He won an IEEE Transactions on Evolutionary Computation Outstanding Paper Award 2017, and a Victoria University of Wellington Early Research Excellence Award 2018. As the sole investigator, he won the 2nd prize of the Competition at IEEE WCCI 2014: Optimisation of Problems with Multiple Interdependent Components. He serves as a Vice-Chair of the IEEE CIS Emergent Technologies Technical Committee, and a member of three IEEE CIS Task Forces and two IEEE CIS Technical Committees. He is an Editorial Board Member of International Journal of Bio-Inspired Computation, an Associate Editor of International Journal of Applied Evolutionary Computation and International Journal of Automation and Control, and a guest editor of a special issue of the Genetic Programming Evolvable Machine journal. He has organised a number of special sessions in international conferences such as IEEE CEC. He serves as a reviewer of over 30 international journals including the top journals in EC and OR. He was an Outstanding Reviewer for Applied Soft Computing in 2015 and 2017, and IEEE Transactions on Cybernetics in 2018.
Ryuichi Yokoyama
Waseda University, Japan

Title: Resilient Networked Microgrid under Natural Disasters and Autonomous Community for the New Normal Life
Abstract: In this decade, many countries experienced natural and accidental disasters such as typhoons, floods, earthquakes, and nuclear plant accidents causing catastrophic damage to infrastructures. Since the beginning of 2019, all the countries in the world are struggling in the Corona Virus and pursuing the countermeasures including inoculation of vaccine and change of life style and social structures. All these experiences made the residents in the regions keenly aware of the needs for new infrastructures that are resilient and autonomous so that vital life-lines are secured in calamities. A paradigm shift has been taking place toward reorganizing the energy management practice in Japan and other countries by effective use of sustainable energy and new infrastructures. However, such new power sources would affect the power grid through fluctuation of power output and the deterioration of power quality. Therefore, a new social infrastructure and novel energy management system to supply electric power would be required. In this presentation, features and developments of the “Networked microgrid” which is resilient in case of natural disaster by effective use of renewable energy and “autonomous community” which supplies robust sustainable society for the New Normal Life are discussed.
Bio: Ryuichi Yokoyama received the degrees of B.S., M.S., and Ph.D. in electrical engineering from Waseda University, Tokyo, Japan, in 1968, 1970, and 1974 respectively. After working in Mitsubishi Research Institute, from 1978 through 2007, he was a professor in the Faculty of Technology of Tokyo Metropolitan University. Since 2007, he had been a professor of the Graduate School of Environment and Energy Engineering in Waseda University. His fields of interests include planning, operation, control and optimization of large-scale environment and energy systems, and economic analysis and risk management of deregulated power markets. Now, he is a Professor Emeritus of Waseda University, a Life Fellow of IEEE, a Life Fellow of IEE of Japan. He is also Chairmen of Standardization Commissions of Electric Apparatus in METI Japan. He is a President of Consortium of Reginal Autonomous Microgrid of Japan and CEO of the Energy and Environment Technology Research Institute.
Nottingham Trent University, England

Title: Computational Intelligence Approaches for Anomaly Detection in Activities of Daily Living
Abstract: This talk presents a review of computational intelligence approaches for anomaly detection in activities of daily living. The classical novelty detection process identifies new or unknown data by detecting if test data differs significantly from the data available during training. It is applicable for anomaly detection in a situation where there is sufficiently large training data representing the normal class and little or no training data for the anomalous (or abnormal) class. Anomaly in activities of daily living is identified as any significant deviation from an individual’s usual behavioural routine. There are different approaches to collect information related to the activities of daily living including the sensors installed in the environment, wearable devices or mobile phones. Once the data are gathered, the most important task is to distinguish abnormal patterns of activities. An anomaly such as a fall in activities of daily living is a rare event and classical detection techniques will not work due to lack of training data. Hence, the need for more intelligent techniques to identify anomalies.
Bio: Ahmad Lotfi is currently a Professor of Computational Intelligence and Head of the Department of Computer Science at Nottingham Trent University, Nottingham, where he is also leading the Computational Intelligence and Applications (CIA) research group. Areas of his research interest include computational intelligence, ambient intelligence, assistive robotics, smart homes and smart industry. His research has been recognised internationally for significant contributions to the application of computational intelligence techniques in control systems and intelligent environments. He has supervised many research fellows and over 20 PhD research students to successful completion. He has worked in collaboration with many healthcare commercial organisations and end-users. He has received external funding from Innovate UK, EU and industrial companies to support his research.He has authored and co-authored over 200 scientific papers in the area of computational intelligence, anomaly detection and machine learning in highly prestigious journals and international conferences. He has been invited as an Expert Evaluator and Panel Member for many EU Framework Research Programmes. More details are available from: http://www.lotfi.uk
All manuscripts must be submitted electronically in PDF format before the deadline. Only English manuscripts are acceptable. The initial version of each paper cannot exceed 8 pages. The camera-ready version of each accepted paper is also up to 8 pages in total, but each page in excess of 6 will incur an extra charge. Manuscripts should be on A4 sized paper (210 mm x 297 mm), in two-column format, with top and bottom margins of 25 mm, left and right margins of 20 mm, column width of 80 mm, and inter-column gap of 5 mm. All figures and tables should be clearly visible, and the paper template in LaTeX or Word can be downloaded from the conference website or https://cms.amss.ac.cn/resources.php#iwaciii. A complete paper should be submitted via https://cms.amss.ac.cn which is an online conference paper management system. You may also download the full Call For Papers to learn more about our plans for this year's conference. Selected papers will also be published in the special issue of JACIII.
IWACIII 2021 Program can be downloaded here!
Notice! ↓
↓
Dear participants,
Many thanks for your support to IWACIII 2021. Due to the coronavirus epidemic, IWACIII 2021 will be held on line on Zoom.
The zoom ID for the Meeting Rooms are listed as below:
Room 1,Join the zoom meeting:zoom ID 305 125 7705,Link:https://zoom.us/j/3051257705?pwd=czhZQmZjaFh1c0IyQ3llek1rNTNOQT09
Room 2,Join the zoom meeting:Zoom ID:437 986 4835,Link:https://zoom.us/j/4379864835?pwd=Ym8vYnU3b2h4Nk5aMnpPZ3hJZXQ1QT09
Room 3,Join the zoom meeting:Zoom ID:493 156 2287,Link:https://zoom.us/j/4931562287?pwd=UkZLTkNlbWl4SlJLdGZEeTE5Y1Q0Zz09
Room 4,Join the zoom meeting:Zoom ID:286 522 3868,Link:https://zoom.us/j/2865223868?pwd=cTBFN3pKd1doUkRTcjFVdGRyVVBsQT09
Room 5,Join the zoom meeting:Zoom ID:272 311 5592,Link:https://zoom.us/j/2723115592?pwd=MWwwaVB0YUVOZVBTZFpWTll6VFJ3dz09
Room 6,Join the zoom meeting:Zoom ID:571 755 7572,Link:
https://zoom.us/j/5717557572?pwd=OTk0TTcwNE1wRUlMZm1JR0JlbllMUT09
Room 7,Join the zoom meeting:Zoom ID:261 478 3007,Link:
https://zoom.us/j/2614783007?pwd=L3UrSjZoZTJ4dXdZUU9OUjAxZHZFQT09
Please click to download and install zoom:https://zoom.us/download.
If you have already downloaded APP of zoom, please do remember to update it before the meeting.
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
Proposal of Action Recommendation System Based on User Contexts in Daily Life
Hiroki SHIBATA, Yu SHIRAI, and Yasufumi TAKAMA
This paper proposes a new combined system to recommend actions in daily life to users based on user context. Bandit algorithm is employed to choose an effective presentation of recommendation to both users and the system. Experiments are conducted on simulated environment using persona that models the typical Japanese people behavior. It shows the performance of the proposed system in supporting user’s life.
Multi-View Evolutionary Strategy Consensus Based Pose
Wei QUAN and Naoyuki KUBOTA
In this paper, we propose a framework for rapidly estimating three-dimensional human pose from two camera views. It is based on an evolutionary algorithm. This system can be applied straightforwardly to inexpensive smart devices and used to evaluate multiple individuals’ calisthenics with two or more smart devices. On the other hand, in order to verify and evaluate input, Evolutionary Strategy Consensus was introduced to estimate fundamental matrix between views. The result shows that two dimensional position of human joints can be estimated into three dimensional pose even with errors.
Design and Implementation of Intelligent Question-Answer System Based on Campus Network Service
Yuanyuan CAO, Jiaqi HUANG, Zhiyong XU, Yuanjun ZOU, Wei SU, Xuefeng PAN, and Xiaorui HOU
In this paper, the intelligent question-answer system based on the campus network service knowledge graph was proposed. The intelligent question-answer system was convenient to the customer of the campus network, and it can promote the efficiency of campus information services. The entity keyword in the question of the customer was extracted by part-of-speech tagging, then the question template that was mostly closed to the question semantic in the system was calculated by the hybrid algorithm based on the term frequency-inverse document frequency (TF-IDF) algorithm and naive Bayesian classifier. Finally, according to the question type of the question template and the entity keywords in the question, the Cypher statement was constructed to complete the retrieval of the answer from the knowledge graph, and the answer would be returned to the customer. The intelligent question-answer system based on the campus network service knowledge graph can help the operation and maintenance staff of the campus network to reduce the workload. The question-answer accuracy test of the system was conducted in this paper, and the results illuminated that the accuracy of answering questions reached to 86%. The compatibility testing of this system was performed, and the results indicated the system compatible with all mainstream operation systems and browsers. At last, the concurrent request processing capability of the system was measured by JMeter, the results indicated that for 20 users, the shortest response time is 153 ms, the longest response time is 1445 ms, the average response time is 395 ms, the median response time is 254 ms, and the error rate is 0, the throughput is 4.1/sec.
Dynamically Weighted Ensemble Models Based on the Behavioral Similarity Towards Sentiment Estimation
Akihiro MATSUFUJI, Eri SATO-SHIMOKAWARA, Toru YAMAGUCHI, and Lieu-Hen CHEN
Recent emotion recognition applications strongly rely on supervised learning techniques for the distinction of general emotion expressions. However, they are not reliable to unknown person, due to the individual differences between human emotional state and their emotion expressions. In this study, a novel multi classifier ensemble learning using dynamic weights based on the similarity of the emotion expression among different people is proposed to reduce the interference of unreliable decision information and adapt their individual differences. We proposed two dynamic weights definition methods which are based on the statistically feature analysis and the analysis of multi modal time series data using image-conversion. We demonstrated the flexibility of these methods to adapt their individual differences with finding the trained data of person who has similar individual differences between human emotional state and their expressed features.
Comparative Study on Neural Network Models of Human Behavior Recognition Methods
Jiazhi LI, Ning LIU, Dedi ZHANG, and Fuchao LIU
To solve the problem of human behavior feature extraction and classification, a human behavior recognition and classification method based on convolutional neural network (CNN) and long short-term memory network (LSTM) was proposed. Due to the strong correlation between the front and back movements of the human body, compared with the single convolutional neural network model, the model integrated with the long and short memory network can more accurately identify the six movements of walking, jogging, going upstairs, coming down, standing and sitting. The convolutional neural network is used to extract the acceleration features, and then the extracted features are input to the long and short term memory network for classification, to complete the human behavior recognition. Through simulation and verification, the CNN-LSTM hybrid model can achieve an average accuracy of 96.9% for action recognition by testing in the open WISDM data set and observing the results of several experiments, which verifies the feasibility of this method.
Video Action Retrieval System Based on Behavior Gesture Recognition Technology
Wenshan LYU, Bolong TANG, Haoping HU, Dan CHEN, and Hongbin MA
At present, behavioral gesture recognition technology has a wide range of applications in various fields, including sports. With the 2022 Beijing Winter Olympics approaching, it is highly required to improve the training quality of athletes by developing a video action retrieval system using behavioral gesture recognition technology. This system is based on OpenPose, which enables us to recognize the athlete’s posture in the video and extract each posture feature and its frame number. Bayesian classifier is used to classify the extracted posture feature based on the constructed human posture database. When an athlete retrieves a certain action type in the training video, the classifier finds out all the actions of this type contained in the video. The frame number of all these actions will be converted into the position of the video progress bar and output. The system allows athletes to quickly retrieve specific actions in training videos and better discover the technical issues.
Economical Optimal of Virtual Power Plant with Source, Load and Storage
Xiaohui CHANG, Wei CHEN, and Chunquan MI
As an emerging form of energy aggregation, virtual power plant (VPP) can reduce the impact of the uncertainty of the output power of new energy sources such as wind power and photovoltaics on the grid security and improve the reliability of power supply. It is the future development of new energy grid-connected direction. In order to improve the scheduling flexibility of VPP, reduce power generation costs, and obtain better benefits for VPP, based on previous studies, considering the impact of load on VPP, a VPP economic optimization scheduling model considering source-load-storage joint operation is constructed in order to reduce forecast errors and increase VPP revenue, the scheduling model adopts multi-period scale optimization and multi-market profit model. Finally, particle swarm algorithm is used to solve the model and optimize the energy output in VPP. The simulation example analyzes the VPP internal power supply and the VPP output optimization situation, and compares and analyzes the interruptible load participation in the VPP scheduling and the impact of the change in the proportion on the VPP revenue, as well as the economic differences of the VPP under the four different operating modes. The simulation results show that the flexibility and economy of VPP can be improved by aggregating an appropriate proportion of interruptible loads and adopting a reasonable operation mode.
Space MMF Harmonic Rotor Losses Under Healthy and Open Circuit Conditions
Xing GUAN, Zhen CHEN, and Yumeng LI
Rotor eddy current losses of a five phase dual-rotor permanent magnet synchronous machine (DR-PMSM) are investigated in both healthy working condition and open circuit fault conditions in this paper. The studied eddy current losses are induced by harmonics of stator magneto-motive force (MMF). The eddy current losses are calculated by finite element method (FEM) using an improved point current model to generate MMFs for different conditions. The calculation results are analyzed and applied in thermal analysis. Finally, experimental measurements and validations are conducted.
Optimal Dispatch Strategy of Renewable Energy Power System Based on Wind Power Forecasting
Yulong HAN, Licai GUO, and Haibo HE
China’s electric power system is undergoing a drastic change in which new energy gradually replaces traditional fossil energy. New energy generation represented by wind power has the characteristics of randomness and volatility, which brings challenges to maintain the power balance of the power system, and the problem of new energy consumption is increasingly serious. This paper focuses on the optimization dispatch of new energy power system based on wind power short-term forecast. Under the current situation of increasing proportion of new energy, the power system is stable and the new energy is absorbed as much as possible through optimal dispatching.
Energy Management of Hybrid Storage in Distributed Generation System
Bin LI, Jilei YE, Yu ZHANG, Shanshan SHI, and Mingzhe LI
This paper focuses on energy management of hybrid storage system which consists of batteries and flywheel in distributed renewable generation system including a wind turbine, photovoltaic panels, batteries and a flywheel system. According to states of charge (SOC) of the battery array and the flywheel system, there are several modes in storage system. Control strategy for each mode is described in both grid-connected and islanded operations, based on the characteristics of battery-array (as a long-time storage) and flywheel system (as a fast-dynamic storage). With the control strategies, power can be kept balanced in distributed renewable generation system to reduce fluctuation of wind and solar to utility grid work in islanded operation. Simulation results are shown to verify the control strategies.
M1-2-5![]()
Deep Learning Based Multi-Objective Power Grid Investment Behavior Analysis and Income Prediction
Wendong XIAO
Design of Variable Frequency Control System of Direct-Drive Wind Motor
Quan LIU, Zhengjun HUANG, and Yibo ZHANG
Based on the analysis of the principle and traditional control strategy of the converter, according to the design requirements of the converters, the design of the machine-side converter and the grid-side converter is introduced in detail. The converter control adopts zero DC current control and speed outer loop current inner loop control mode, and the grid-side converter adopts voltage outer loop current inner loop control strategy. It provides a theoretical basis for the subsequent establishment of the converter simulation model.
Fault Diagnosis of Elevator Safety Circuit Based on Deep Forest
Gan WU, Dong WEI, and Shuo FANG
There exist some problems in the current diagnosis methods of elevator faults, including complicated calculation, numerous parameters and difficulties in effectively processing information of the faults’ feature. This paper proposes a method of diagnosing the faults of elevator’s safety loop, and designs a structure of the faults’ diagnosis model. Furthermore, on this basis a collection system of elevator’s fault signals is developed, with which, the parameters of corresponding feature can be obtained, and then the information of elevator faults’ feature can be extrated through Multi-Grained scanning. At last, diagnosing the faults of elevator safety loop is realized through Cascade Forest. The experiment result shows that with this method the diagnosis accuracy is 4% higher and the model operation time is 99.1% faster than BPNN.
Characteristic Model-Based Intelligent Adaptive Control of Voice Coil Motor in Vibration Isolation of Airship Camera Stabilized Platform
Junjie GUAN and Shaoping SHEN
Airship is easily disturbed and vibrates during flight, which affects the shooting effect of the on-board camera. However, the current three-axis stabilized platforms do not have the ability to isolate vibrations in the vertical direction. In this paper, we propose an airship camera stabilized platform that uses Voice Coil Motor (VCM) to isolate vibrations in the vertical direction. Firstly, we establish the mathematical model and control model of the VCM. Then we design the Characteristic Model-Based Intelligent Adaptive Controller for the VCM. Simulation experiments show that the adaptive control method is effective in VCM control and improves the stability and anti-interference ability.
Perimeter Control for Macroscopic Fundamental Diagram Systems Based on Neural Network and Generalized Predictive Control
Ying ZHANG, Yuntao SHI, Xiang YIN, Meng ZHOU, Weichuan LIU, and Daqian LIU
Macroscopic traffic flow forms show heavily similarity between days, so this paper uses past data to train a neural network for fitting the MFD system. This paper presents a framework for combining neural network with generalized predictive control. First, a region traffic network model is identified by the neural network which can approximate any nonlinear system. Second, the MFD system is transformed into linear system because of linearizing neural network models at each operation point. Third, the optimal perimeter control of the two regions is achieved by the generalized predictive control method with the instantaneous linearization model. Simulation results show that the proposed frame significantly alleviates congestion in the network and reduces the total travel time spend in the traffic network.
Adaptive Optimal Control for a Class of Continuous-Time Unknown Nonlinear Systems via Generative Adversarial Networks
Chenglong WANG, Haiyang FANG, and Shuping HE
In this paper, we study the adaptive optimal controller design problems for a class of continuous-time nonlinear systems by using the generative adversarial networks (GANs). Combining the Q-learning algorithm and GANs scheme, we successfully design a new adaptive optimal control algorithm for continuous-time unknown nonlinear systems. We adopt the latest GANs training strategy to stabilize the nonlinear systems and prove the convergence of the designed adaptive optimal control algorithm. Finally, the effectiveness of the proposed method is verified by a simulation example and the superiority of the algorithm is illustrated by comparing the traditional actor-critic algorithm.
Model Free Adaptive Iterative Learning Control for Power Inverter
Zhenxuan LI, Yilong ZHANG, Jijia ZONG, and Guo-Xin ZHAO
In this paper, a model-free adaptive iterative learning control (MFAILC) scheme based on pulsewidth-modulated (PWM) is proposed for power inverter system. The goal of this work is to achieve a high-quality output voltage and robustness to disturbances and uncertainties in the inverter system. Only the measurement input/output (I/O) data of the controlled plant are used of the power inverter system. Furthermore, the repetitiveness was used by iterative learning control method. Through rigorous analysis, it is shown that the MFAILC method could deal with this class of control problem and greatly decrease the error of the current cycle by using the control input and tracking error information at the past repeated process. In addition, the feasibility and effectiveness of the proposed approach are further verified through case studies with intensive simulations.
Research on Fault Diagnosis Algorithm of Substation Equipment Based on Improved Mask R-CNN
Yang YANG, Guanxun DIAO, Ning YANG, Mei WANG, Pengfei JIA, Chengchen QIAN, and Lihua LI
Electric power networks are composed of various electrical equipment. Any equipment failures can affect the stable operation of the electric networks. By analyzing the infrared images of substation equipment, equipment defects can be found in time to prevent malfunctions effectively. This paper proposes an infrared image fault diagnosis algorithm for substation equipment based on the improved Mask R-CNN. Attention mechanism is introduced into the feature extraction network, and the anchor ratios are modified. Firstly, the improved Mask R-CNN is applied to detect and segment the target equipment, including lightning arresters, current transformers side bushings, current transformers, and voltage transformers. Then the temperature is extracted from the infrared image. Finally, the relative temperature difference method is used to determine the fault type and seriousness. The original method and the proposed method were compared in aspects of split effect and temperature anomaly diagnosis. Experimental results show that the IoU (Intersection over Union) of proposed algorithm improves 6.08% compared with original method.
IoT Gateway with Edge Computing Function
Ruiguang CHEN, Xiaoyan ZHAO, Jianwei LI, Chunlei LI, Tianyao ZHANG, Yan CHEN, Jiawei WANG, Yihao WANG, and Zhaohui ZHANG
With the development of cloud computing, distributed IoT systems are also constantly evolving. Due to the different requirements for data collection in different scenarios, the functions of edge IoT systems are also different. Some of the Internet of Things (IoT) data collection load is heavy, but the amount of data that needs to be uploaded is not large. Some IoT needs to prioritize the collected data or filter some private data. For this reason, the gateway built between the IoT and the Internet should have certain functions of calculation and data concentration. This article uses RK3399 as a platform to transplant an embedded operating system, and uses a custom data frame to convert data from sensor network coordinators into a unified format such as ZigBee, Wi-Fi, LoRa, etc. According to different attributes such as type, source, authority, priority, the data is classified, stored, filtered, and calculated. Finally, the saved data is forwarded to the network in the form of a file by the TCP/IP protocol to realize remote data monitoring. Performing certain calculations and classification processing in advance through the gateway reduces the load of the access network and the pressure of data processing for the data aggregation center. In addition, the local data storage function of the gateway not only reduces the risk of data loss, but also provides the possibility for repeated queries. At the same time, the gateway also reserves a corresponding server thread for the access control of the local area network.
Research on Wireless Coverage Performance of LTE-V2X in Urban Scenario
Jiahui QIU, Jiaying FENG, Xiaobo LIN, Chao CAI, and Xiangyun ZHANG
As a ubiquitous connection scenario, IoV is the infrastructure and technical path to realize intelligent transportation. With the development of communication technology, more and more entities are added to the communication network and become the elements of the network. How to reasonably deploy the devices according to the scenario characteristics has become the key point of the development of V2X technology. In this paper, comparison between Uu communication and PC5 communication in LTE-V2X as well as the classification of LTE-V2X are first introduced. Moreover, typical scenarios of V2X communication are analyzed. Finally, test and evaluation work for V2X network quality are conducted and recommendations are made for RSU deployment. It can be concluded that in the urban scenario, the effective coverage distance is about 400 to 500 meters. Surrounding trees and buildings have obvious shielding effect on LTE-V2X signals, and therefore, RSUs cannot cover the next intersection. In actual deployment, some roads should supplement more RSUs to satisfy the coverage requirements. Recommendations for deployment scheme in urban scenarios are also presented.
Gradient-Based Optimizer for Scheduling Deadline-Constrained Workflows in the Cloud
Danjing WANG, Huifang LI, Youwei ZHANG, and Baihai ZHANG
In recent years, as cloud computing has become a promising paradigm which can dynamically provide users with elastic computation resources, more and more scientific and business applications represented by workflows have been moved or are in active transition to cloud platforms. Therefore, efficient cloud workflow scheduling methods are in high demand. Inspired by the gradient-based Newton’s method, gradient-based optimizer (GBO) is a novel meta-heuristic algorithm which shows promising results due to its enhanced capabilities of exploration, exploitation, and effective avoidance of local optima. Hence in this paper, we design a workflow scheduling algorithm based on GBO, which aims to minimize the execution cost of scheduling workflows under the given deadline constraints. We also conduct extensive comparative experiments with a genetic algorithm and particle swarm optimization over well-known scientific workflows with different sizes and types through WorkflowSim. The experimental results show that the proposed GBO-based scheduling algorithm has better performance than its peers in both constraint satisfiability and cost optimization, which proves its effectiveness in addressing workflow scheduling problems.
A Comparison Study of DQN and PPO Based Reinforcement Learning for Scheduling Workflows in the Cloud
Jianghang HUANG, Huifang LI, Yaoyao LU, and Senchun CHAI
As a new mode of resource and service provision, cloud computing provides a cost-effective deploying environment for hosting scientific applications. More and more applications modeled as workflows are being moved to the cloud. However, the traditional heuristic and metaheuristic algorithms encounter some problems that cannot be ignored in solving the scheduling problem, such as difficult to get the optimal solution or consuming too much time. In this work, we design the corresponding workflow scheduling model based on Deep Q-Network (DQN) and Proximal Policy Optimization (PPO) algorithm with makespan minimized, and explore the performance difference of DQN and PPO algorithms in workflow scheduling through different experiments. Firstly, a cloud workflow scheduling environment is developed based on the cloud workflow task model. Secondly, according to the DQN and PPO algorithm, the agent models are designed. Then we train the resulting workflow scheduling models. During the training process, the agent (actor) learns and accumulates experience constantly to optimize the scheduling results. Finally, experiments are conducted and results show that both PPO algorithm and DQN algorithm show excellent characteristics in solving the cloud workflow scheduling problem, which also reflects the advantages of deep reinforcement learning in sequential decision optimization.
Research on Edge Cloud Load Balancing Strategy Based on Chaotic Hierarchical Gene Replication
Leilei ZHU, Zhao KE, Zhichen WU, Dan LIU, Wei SU, and Li LI
Edge cloud is usually used to dispose delay-sensitive business, realize the processing and analysis of local real-time and short-cycle data. However, due to the large number of concurrent requests for edge intensive tasks, the resource allocation strategy will seriously affect the stability of nodes. To solve this problem, an adaptive resource allocation model (CRPSO model) based on chaotic hierarchical gene replication is proposed in this paper. In the model, the concept of chaotic replication ratio is proposed. Based on Kubernetes edge cluster, the resource allocation results of CRPSO model are verified from three aspects: CPU variance, memory variance and total variance of two kinds of resources. Experiments show that the fitness of this model is much higher than that of the comparison algorithm on average, and the convergence rate of this model remains optimal even though the solution space is set to be exponential. In addition, the variance fluctuation range of CPU and memory is lower than that of Kubernetes clustering algorithm after resource allocation. Therefore, this model is suitable for edge large-scale task request scenario.
A Data Fusion System for Multi-Protocol Internet of Things
Jianwei LI, Xiaoyan ZHAO, Ruiguang CHEN, Chunlei LI, Yan CHEN, Tianyao ZHANG, Jiawei WANG, Yihao WANG, and Zhaohui ZHANG
Due to the heterogeneity of various communication protocols in the Internet of Things (IoT) system, there is no unified communication interface standard for IoT devices. Multi-protocol IoT data fusion system was designed in this paper, which can be applied to the environmental detection of smart community. This system is based on the idea of layered design model. Firstly, various sensors are used in the sensing layer to collect environmental information in the community. Then, four wireless communication protocols, WiFi, ZigBee, LoRa and Bluetooth, are used in the wireless transmission layer to transmit the data in the sensing layer to the next layer. Secondly, protocol adaptation layer is added between wireless transport layer and application layer. In the protocol adaptation layer, a unified communication frame format is formulated. Finally, in the application layer, we developed the upper computer software through QT, and the gateway completes the data interaction with the application layer through TCP/IP protocol. The test results show that the system can support the data acquisition of multiple types of sensors and transmit the data through the above four wireless communication technologies. This system can complete the unified conversion of data format in the protocol adaptation layer and also has a strong data transmission stability, in line with the application requirements.
Stochastic Adaptive Dynamical Games
Shuo YUAN
In the past half century, game theory and control theory have made great progress. Although game theory, especially dynamic game, is closely connected with control theory, they have been developed in parallel to a great degree. As for adaptive control, there is few research work on systems where there are competitions among agents. And in real world systems, uncertainties always exist in game models, while almost all of the existing studies assume that the model parameters are known to the players. There is few existing result related to such stochastic adaptive game problems, since uncertainty raises the difficulty of making decisions for players. How to design the game strategies when the internal parameters of the game systems are unknown is a meaningful research direction. We attempt to cope with this problem by combining the methods of adaptive control, which use the online measurement information to estimate the unknowns, and then construct the controller by the so called “certainty equivalence principle”. We study the stochastic adaptive dynamical game, focusing on the question how to design adaptive game strategies for linear systems of the pursuit-evasion game and the attack-defense game with quadratic indexes, when the internal parameters of the systems are unknown. Specifically, first of all, the players respectively use the least squares estimation algorithms to estimate the unknown parameter. Secondly, the players construct their adaptive strategies using their own parameter estimators. At last, we prove that, the adaptive strategies makes the system globally stable, and that the action profile is an asymptotic Nash equilibrium solution to our game problem in a certain sense.
M1-5-2![]()
Convergence Analysis and Strategy Control of Evolutionary Games on Square Lattice
Ge CHEN and Yongyuan YU
The Combat Game on a Plane Between Two Agents
Yazhe DING, Yifen MU, Hongbin MA, and Xiaoguang YANG
This paper explores the combat game between two agents, which might be the unmanned aerial vehicles (UAV), AIs for electronic games, or robots to play soccer. The game is played on a 2-D latticed plane while the agents have the finite life and capability to attack. The boundedly rational agents will make decisions based on their predictions of their opponents. The evolutionary features of such a system as well as some analysis about the optimal strategies for agents will be investigated.
Regulation on Nash Equilibriums in Game-Based Control Systems
Yongyuan YU and Renren ZHANG
The game-based control system (GBCS), which is a cross between control theory and game theory, was established to investigate objects driven by the external input and their own interests. This paper studies a special type of GBCSs with rational players, openloop Nash equilibrium of which is unique under any given initial state and macro-regulation. To make low-level micro-followers “better” by resorting to macro-regulation, two kinds of regulation on Nash Equilibriums are discussed under Pareto and Kaldor-Hicks criteria, respectively. By resorting to macro-regulation, one occurs the Pareto improvement on Nash Equilibriums, the other achieves the potential Pareto improvement while generating the optimal action profile, both of which reduce the inconsistency between individual and collective rationality. Some conditions are given to determine the solvability of corresponding regulation problems on Nash Equilibriums.
Confrontation Analysis of Wargame Deduction in Zero-Sum Game Based on Petri Net
Xiangri LU and Hongbin MA
According to the major special guidance of the new generation of artificial intelligence, for the needs of future operatioons, the confrontation agent needs to complete complex tasks autonomously, make correct judgments on the surrounding environment and surrounding dangers at the first time, and have the ability to unsupervised learning and adaptive learning for the agent put forward new requirements. This artile assumes that the red and blue each have three tanks to take control of the center of the map. The opposing parties can use their own cooperation and enemy-to-enemy to conduct Wargames. Through the Petri net, the red and blue agent confrontation simulation shows the process of cooperative and non-cooperative game between the red and blue parties. Finally, PIPEv4.3.0 is used to analyze the confrontation effect of the simulated Petri net, whether there are deadlocks and minimum traps. Provide guidance and countermeasures for follow-up operations.
Dynamic Games with Dynamic Uncertainty
Renren ZHANG
Uncertainty has been studied a lot in both control theory and game theory. Especially in control theory, how to use feedback to deal with uncertainty is the core problem. The paper initially explores dynamic games with dynamic uncertainty from the perspective of control theory. As a starting point toward investigating the problem, the easy-to-understand boolean dynamic game described by a boolean mapping f is selected and the dynamic uncertainty is represented by a set of boolean mapping F. All game participants know the dynamics of the system f is in F but do not know which one it is. To get some initial insight to the problem, it is formulated as a Bayesian game. Some results of the existence and computation of the Nash equilibrium are given in the paper.
A Maze Robot Autonomous Navigation Method Based on Curiosity and Reinforcement Learning
Xiaoping ZHANG, Yihao LIU, Dunli HU, and Lei LIU
Robot navigation gets a lot of attention today, and more and more scholars are trying to find new ways to make robot’s navigation more intelligent. Maze problem is a typical case of robot autonomous navigation, which is also what we study in this paper. In maze problem, finding the exit quickly is one of the important indexes to measure the quality of the algorithm. Reducing unnecessary exploration can solve this problem well. With this in mind, we design an autonomous navigation algorithm for maze robot based on curiosity and Q-learning. The curiosity is designed based on the Sigmoid function, and it influences the probability of the action selection in reinforcement learning way. In addition, a memory module is designed to store nodes and Q-values in sequence. The information that recorded is used for the curiosity on the one hand, and makes global reinforcement on the other hand. We simulate the feasibility and advantages of the algorithm respectively, and results show that the robot can reduce repeated exploration of the environment in the process of autonomous navigation, and it has a faster convergence rate compared with the Q-learning algorithm without curiosity.
A Heuristic Route Planning Algorithm for Air-Ground Collaborative Surveillance
Yulong DING, Bin XIN, Lihua DOU, and Jie CHEN
This paper addresses a novel route planning problem of an air-ground collaborative system for intelligence, surveillance, and reconnaissance mission. In the collaborative system, a ground vehicle (GV) travels on the road network and its carried unmanned aerial vehicle (UAV) travels in areas beyond the road to visit a number of targets unreached by the GV. The UAV needs to launch and land on the GV frequently to change its battery. We model the two-echelon cooperative route planning problem for the GV and the UAV as a constrained optimization problem which tries to minimize the overall execution time for completing surveillance tasks. To solve this problem, a splitting-based heuristic is proposed to rapidly construct GV and UAV routes. A node selection algorithm is developed and embedded to select the appropriate rendezvous nodes between UAV and GV. Computational results show that the proposed approach can effectively generate better cooperative GV and UAV tours to complete the surveillance missions in a shorter time when compared to other two competitive approaches in the literature.
An Improved Fuzzy Neural Network for Obstacle Avoidance of Mobile Robot
Tian GAO, Qinglin WANG, Yaping DAI, and Zhiyang JIA
In order to solve the problem of complex structure and heavy computation load of fuzzy neural network (FNN) in the application of mobile robot obstacle avoidance, an improved fuzzy neural network is proposed. The last two layers in conventional FNN are combined and optimized in the proposed network. By matching the connection weights of the last layer in the network with the central values of the membership functions of the output variables, the number of parameters to be tuned is greatly reduced. The structure and calculation of the network are optimized. The simulation result indicates the effectiveness of the proposed network in obstacle avoidance of mobile robot.
Multi-Scale Batch-Learning Growing Neural Gas for Topological Feature Extraction in Navigation of Mobility Support Robots
Mutsumi IWASA, Naoyuki KUBOTA, and Yuichiro TODA
Recently, the concept of digital twin is applied to various research topics. The aim of digital twin is to simulate and analyze the real world in the cyber space. In order to simulate a real-world phenomenon, we often have to extract features and structures based on graph theory and topology. The methodology of growing neural gas (GNG) is useful to extract topological features hidden in big data. In this paper, we propose a method of multi-scale batch learning (MS-BL) to the realize stable learning of GNG. Next, we apply the proposed method to the topological feature extraction in navigation tasks of mobility support robots. Finally, we show experimental results of the proposed method and discuss the effectiveness of the proposed method.
Ground Automatic Recycling System for UAVs in the Wild
Jinge SI, Shoukun WANG, Bin LI, Hao ZHANG, and Junzheng WANG
The safe recycling is a huge challenge for the unmanned aerial vehicle (UAV) in complex terrains, especially in the wild. A ground automatic recycling system (GARS) is designed for UAVs recycling in this paper, and it aims to provide a safe, moving, flexible, level landing platform for drones. The GARS consists of three parts: the UAV positioning subsystem (UAVPS) for detecting and positioning the drone, the ground tracking subsystem (GTS) for dynamically tracking the landing point and the comprehensive undertaking subsystem (CUS) for reliably recycling. In this paper, the working principle and the hardware structure of the GARS are introduced first. Secondly, the algorithms of three subsystems are designed. Finally, the experiments of the UAV recycle are carried out in the wild. The results show that the system can effectively recycle UAVs in the wild environment, which verifies the effectiveness of the algorithms.
Three Dimensional Path Planning for UAV Based on Chaotic Gravitational Search Algorithm
Keming JIAO, Jie CHEN, Bin XIN, Li LI, Yifan ZHENG, and Zhixin ZHAO
Path planning is a critical problem for an unmanned aerial vehicle (UAV), which assists UAV to find a desirable path under some constraints. A chaotic gravitational search algorithm (CGSA) is proposed for UAV path planning in three dimensional (3D) environment. Firstly, the cost function considers the path length, turning angle, climbing angle, and maximum and minimum flight heights. Secondly, the chaotic sequence of the sine map is used to determine the size of the Kbest set storing the best agents in gravitational search algorithm (GSA), which improves the balance of exploration and exploitation. Finally, the simulation results demonstrate that CGSA is more effective and better than the moth flame optimization algorithm (MFO) and GSA in 3D path planning.
Quantum Representation for Robot’s Emotions Based on PAD Model
Xiao LING, Shan ZHAO, and Hongyu ZHAI
The development line of robotics is marked with the triad: industrial-assistive-social robots, which leads from human-robot separation toward human-robot interaction (HRI). Exploiting the promise of security and efficiency that quantum computing offers, a quantum representation based on the Pleasure-Arousal-Dominance (PAD) emotion model (QRPE) is proposed, which utilizes only n + 3 qubits to store robot emotions in a time cycle. Meanwhile, an example to illustrate quantum robot emotional state is given. Furthermore, three unitary operations that can be performed on the QRPE model to achieve specific transitions are designed. They facilitate the construction of complex quantum algorithms to deal with robot’s emotions and the improvement of robot’s ability to provide better service to humans.
Research on the Path of Developing Information Literacy of Teachers from Colleges of Foreign Languages from the Perspective of Artificial Intelligence
Kexin ZHANG
With the popularization of artificial intelligence in various fields, its application in the education industry has also been deepening. Based on the literature and experts’ opinions on teachers’ information literacy and the application of artificial intelligence in teaching, artificial intelligence is believed to provide more effective supports for the development of teachers’ information literacy in foreign language colleges and universities. The research of this subject is expected to explore an effective path of developing the information literacy of teachers from colleges of foreign languages, so as to provide a useful reference for the further research.
A Multi-Modal Fusion Algorithm for Cross-Modal Video Moment Retrieval
Mohan JIA, Zhongjian DAI, Zhiyang JIA, and Yaping DAI
In order to localize the most relevant moment in an untrimmed video according to the given sentence query, a multi-modal fusion algorithm for cross-modal video moment retrieval is proposed. The key idea of the multi-modal fusion algorithm is to separate the consistent features from the information across modalities and then concatenate them. The concatenated consistent features are taken as the input of the coordinates prediction network, and the regression temporal coordinates are obtained. The correlations between the consistent component pairs can enhance the expressiveness and interaction of the video features and sentence features, thus improves the accuracy. The effect of the proposed algorithm is verified on a public benchmark dataset: TACoS. The results show the effectiveness of the proposed algorithm as compared with CTRL and ACRN under TACoS dataset.
An Emotion Recognition System Based on Human Behavior in Passenger Transport
Qiwei YU, Yaping DAI, Kaoru HIROTA, Zhiyang JIA, and Wei DAI
Passengers’ abnormal emotions such as nervous and anger often lead to traffic accidents in passenger transport. Surveillance of abnormal emotions possesses significant potential for increased security within passenger transport. An emotion recognition system based on human behavior is designed in this paper. Three emotions of quiet, nervous, and anger are set in research. The system uses long short-term memory to process human behavior data, and recognizes whether passengers have abnormal emotions such as nervous or anger based on behavioral analysis. Experiments on the recognition performance of the system, the experimental results show that the system has an accuracy of more than 95%, and the recognition period is between 2 to 3 seconds.
Facial Emotion Recognition Using Convolution Neural Networks-Based Deep Learning Model
Chinonso Paschal UDEH, Luefeng CHEN, and Min WU
With the development of emotion recognition, learning, and analysis, robotics plays a significant role in human perception, attention, memory, decision-making, and social communication, leading to emotion recognition and human-robot interaction (HRI). This research analyzes the interaction between humans and robots using facial expressions and head pose to achieve robustness in understanding emotions by optimizing the traditional deep neural networks to comprehend the coexistence of multi facial information in HRI using convolution neural networks. A hybrid genetic algorithm with stochastic gradient descent is adopted, which has the capacity of inherent, implicit parallelism and better global optimization of the genetic algorithm to find the better weights of the network. The experiment shows the proposal’s effectiveness in providing complete emotion recognition through single-modal cooperation of HRI that can interact with humans and machines.
Multi-Objective Route Planning Based on Machine Emotion
Dan CHEN and Zhen-Tao LIU
Nowadays, driverless technology is developing continuously, and route planning is a key link in driverless technology. To improve the intelligence of route planning, a multi-objective route planning approach based on machine emotion is proposed. The machine emotion adds human like emotion factors in the decision-making process. By combining with linear weighted multi-objective optimization, the human-computer interaction in navigation technology is improved. We used “OpenSceneGraph” software to simulate our method and made a field investigation. The experimental results show that this approach selects a route different from the ordinary one. The approach comprehensively considers the travel time, fuel consumption and passengers’ emotions, which demonstrates the feasibility of our method.
Design and Implementation of Situation Plotting System Based on Hand-Drawn Sketch Recognition
Zhiqiang WU, Hebin WANG, Wenliang ZHANG, and Yong SUN
Military symbology sketch is the most natural human-machine interaction way to express human thinking and also an important means to express battlefield situation. Aiming at the problems of sparse data set, low recognition accuracy and difficult model application of military symbology sketch, this paper proposes a situation plotting system based on hand-drawn sketch recognition. Firstly, through the self-developed military symbology sketch acquisition application, the data set is collected. Then the military symbology sketch is trained based on ResNet34 and the trained model is applied to the Web situation plotting system to realize online military symbology sketch recognition. Finally, the feedback mechanism is introduced to promote the correction of the ResNet34 model, so as to further improve the accuracy of sketch recognition and the human-machine interaction efficiency of the situation plotting system.
A Multi-Scale Feature Fusion Network for Facial Expression Recognition
Jian WANG, Kaoru HIROTA, Yaping DAI, and Zhiyang JIA
A multi-scale feature fusion network is proposed for facial expression recognition (FER). The three-branch architecture is employed to extract abundant facial features from various depths and scales. Our main contributions are twofold. First, the feature extraction module is designed to effectively extract multiscale image information and enhance network ability of feature representation. Second, the feature fusion module is presented to adaptively evaluate the importance of different cross-branch features and fully emphasize the role of distinguishable features for expression classification. In addition, the basic feature extraction unit cascaded in feature extraction module is proposed with different receptive field filters to extract multi-scale features. Experimental results on two public datasets, FER2013 and CK+, demonstrate that our proposed method outperforms the previous methods with the accuracies of 72.67% and 96.00% respectively.
A Memory Matching Algorithm Based on Box IoU Features for Pedestrian Flow Counting
Junlin ZHANG, Kaoru HIROTA, Yaping DAI, and Zhiyang JIA
Automatic pedestrian flow counting on street view surveillance video is faced with challenges such as occlusion, illumination changes and scale changes. These challenges lead to misdetection which affect the accuracy of pedestrian flow counting. Aiming at these problems, a memory matching algorithm based on box Intersection over Union (IoU) features of inter frame bounding box is proposed. By memorizing the box IoU features between frames, the algorithm can ignore the false detected pedestrians and track the lost pedestrians to a certain extent, so as to improve the accuracy of counting. The experimental results on the UCSD data set show that the algorithm has high accuracy which reaches 97.2%.
Dynamic Sign Language Recognition Based on Improved Residual-LSTM Network
Da MA, Kaoru HIROTA, Yaping DAI, and Zhiyang JIA
Sign language recognition aims to recognize meaningful hand movements. In order to solve the problem of low recognition accuracy during the process of sign language recognition, a dynamic sign language recognition method based on improved Residual-LSTM network is proposed. There are two main innovations in this paper. Firstly, the residual learning mechanism and channel attention mechanism are introduced to improve the convolutional neural network. The improved network can effectively extract enough image information and enhance the ability of spatial feature extraction. Secondly, the long-term and short-term memory network is introduced to extract the temporal features of image sequences while reducing the amount of calculation. In addition, YOLO network is used for hand detection, which greatly reduces the amount of network calculation. The experiment is carried out on SLR data set and the recognition accuracy is 91.2%. The results show that this method can recognize the dynamic sign language accurately.
Research on Application of Classification Model and Behavior Recognition Based on Support Vector Machine
Tianshu LIU, Jiandong FANG, and Yudong ZHAO
In order to effectively monitor whether cows have estrus behavior, a combination of background subtraction and external contour feature extraction of cows is proposed to extract cow targets. Use Support Vector Machine (SVM) model to identify its crawling behavior. Use the background subtraction method to extract the moving cow target from the video, preprocess the extracted cow targets; Realize the simulation design of the extraction function of the two geometric features of the cow’s target minimum circumscribed rectangle aspect ratio and centroid aspect ratio; According to the different postures of the cows, an SVM classification and recognition model is established to effectively identify the estrus behavior of the monitored cow. Experimental results show that the proposed method can effectively process the actual video key frames, and the average accuracy of cow behavior recognition can reach 97.5%.
Monitoring of Ruminating Behavior of Dairy Cows Based on Scale-Adaptive KCF
Jiaxin NIE, Jiandong FANG, and Yudong ZHAO
Detecting and tracking the ruminating behavior of dairy cows can obtain information on their physiological activities in time, and provide effective data for dairy cow health monitoring. This study is based on the scale-adaptive KCF (kernel correlation filter). Based on the acquisition of the cow’s mouth area, the cow rumination activity is tracked in real time, and the rumination curve is drawn to obtain the cow’s rumination amount within a certain time range. The experimental results show that the improved scale-adaptive KCF algorithm can accurately analyze the ruminating behavior of dairy cows.
Design of a Hybrid Transmission Line Inspection Robot
Xiaoyu LONG, Guodong YANG, En LI, and Zize LIANG
A hybrid transmission line inspection robot is a combination of a multirotor and a power line landing mechanism, which can perform both airborne and on-wire inspections. An improved design of a hybrid automatic inspection system is demonstrated in this paper, planned to land on a shield line. Installed with a lightweight landing mechanism consists of a belt system drive linear motion mechanism and a gear rack drive wire clamper, the robot can perform both airborne and on-wire inspection to powerlines. The finite element analysis on key components was conducted. In the field, the robot was found to have an acceptable flight performance.
Calibration and 3D Measurement of Bionic Compound-Eye Vision System
Hongmin ZHOU and Yuan LI
In computer vision, the emerging large requirements on large field of view, small size and high sensitivity of interested objects, makes the research on artificial bionic compound eyes a new hot spot. On the basis of previous research, this paper designs and calibrates a compound eye system based on neural network model. The model and calibration can replace tedious developments with intelligent learning, the neural network model parameter identification. The experiments on 3D measurement of close-range objects verified the proposed method.
A Robot Partner Communication System for Smart Home Based on Healthcare as a Service
Shuai SHAO, Rino KABURAGI, and Naoyuki KUBOTA
In recent years, population aging has become a severe social problem. By using smart homes that include robot partners, we can monitor the health of the elderly without additional human resources, but it is a challenge to provide personalized intelligent healthcare services for the elderly. This paper explains a human-centric approach to provide personalized services. From the viewpoint of healthcare as a service, We design a cloud-based healthcare system for smart homes. Next, we explain the system’s data structure and information flow, including sensors and service robots. Furthermore, we develop a scenario editor to realize the accessible design of healthcare services. In the demonstration, as a personalized function of essential fall detection, through the scenario editor, we design a situation confirmation function based on robot communication to prove the effectiveness and usability of the system.
Designing and Modeling of Coanda Drone for Controllability
Ryo SHIMOMURA, Shin KAWAI, and Hajime NOBUHARA
This study proposes an aircraft design that can enable the development of a safe coanda drone without exposing the propeller. In the previously proposed coanda drone design, there is no external force in the yaw axis direction in the linear approximation model; therefore, the model is not controllable. This study proposes redesigning the propulsion mechanism that had previously been designed to be perpendicular to the ground to enable effective control of the yaw axis. The state equation derived shows that the airframe redesigned is controllable. The angle of the propulsion mechanism was changed at an interval of 15 degrees in the range 15–60 degrees, and the difference in response at that time was compared and verified through the simulation experiments conducted. This study shows that the redesigned coanda drone is controllable and useful in future control system designs. Since payload is important in drone systems, it was often assumed that tilting the thrust mechanism of the drone should be minimized; however, the results presented herein show that tilting of the thrust mechanism is not a significant issue from the viewpoint of mobility.
Comparison Study of the State-of-the-Art Algorithms on the Multi-Objective Task Planning of Unmanned Aerial Vehicles with Heterogeneous Payloads
Hao ZHANG, Lihua DOU, Bin XIN, and Qing WANG
This work presents a comparison of three “state-of-the-art” multi-objective evolutionary algorithms, the non-dominated sorting genetic algorithm II (NSGA-II), the decomposition-based multi-objective evolutionary algorithm with the ε-constraint framework (DMOEA-εC) and decomposition-based multiobjective evolutionary algorithm with the adaptive weight vector adjustment (MOEA/D-AWA), when applied to the task planning of unmanned aerial vehicles (UAVs) with heterogeneous payloads. The problem studied in this paper is a mixed-variable optimization problem, which involves the task allocation with inequality constraints and the path planning with neighborhood and curvature constraints. To solve this problem, a bi-level solution scheme is proposed. In the first level, the task allocation is solved by the “state-of-the-art” algorithm with the proposed encoding, the crossover operator, and a series of mutation operators. In the second level, the path planning is solved by a sampling-based heuristic method. In order to verify the performance of these “state-of-the-art” algorithms on the problem of this paper, several random simulation instances with different scales are constructed, and the calculation results are analyzed by using multiple performance evaluation indexes. The comparative results show that DMOEA-εC can find significantly better Pareto fronts in most instances.
Multi-Objective Path Planning Based on an Improved GWO-WOA Method
Meng ZHOU, Zihao WANG, Jing WANG, Weifeng ZHAI, and Tonglai XUE
The problem of multi-objective path planning for robots is to find the shortest, smoothest and safest path in the presence of obstacles, which can be proposed as a multi-objective optimization problem with generous constraints. In this paper, an improved GWO-WOA method is proposed achieve the solution, which mainly consists the following two improvements: First, a tent chaos mechanism is used to improve the initial population quality of grey wolf optimizer (GWO). Second, the hunting mechanism of the whale optimizer algorithm (WOA) is replaced to the hunting strategy of GWO, which can improve the tracking performance of the optimal global exploration searching solutions and avoid falling into the local optimization. Then, a smooth path is calculated based on the proposed hybrid GWO-WOA with spline interpolation method. To further reduce the computing burden, an one-dimensional search method for iteration process is proposed and compared with two-dimensional search method. Finally, simulation experiments demonstrate the feasibility and effectiveness of the proposed algorithm under different environments.
Analysis of Long-Term Care Insurance Data for Deterioration in Care-Need Level at 3 Cities in Rural Japan
Yutaka HATAKEYAMA, Ichiro MIYANO, Sigehiro YASUI, Yuki HYOHDOH, Mariko HIYAMA, and Yoshiyasu OKUHARA
In Japan, Long-Term Care Insurance (LTCI) system has been managed by the municipal governments for providing the care for the elderly by the entire society. We analyzed effects of LTCI services for deterioration in care-need levels in 3 cities of rural area Japan in order to evaluate the difference of LTCI system at each city. We calculated the utilization ratio of LTCI services and hazard ratio (HR) for the deterioration event in 3 years from the first LTCI certification, which the HRs were estimated by survival analysis method. The analysis results showed that the utilization ratios were affected by the initial care-need levels and the participant’s living area. The deterioration events tended to occur at the lower care-need level and the effects of the LTCI services varied by care-need levels and the living area. These results suggested that there existed regional differences in LTCI service system.
Few-Annotation Training by Data Augmentation in Agriculture
Shumpei NODA, Yuki SHINOMIYA, and Shinichi YOSHIDA
Automation of agricultural management has become important by an aging population and decreasing agricultural population. A deep neural network can be applied to detect vegetables and fruits on a farm. Detecting objects in an image taken from a camera leads to counting the objects. However, the training cost for the deep neural network is generally high, and it requires a high-quality large dataset and time consumption. Also, there are various kinds of vegetables, and it is not feasible to train and tune neural networks for all of them because creating datasets for all vegetables requires a high cost. Then, we propose the method which employs a few-shot model and data augmentation for few-shot and few-annotated datasets. Finally, we create the novel dataset for detecting eggplants as a dataset for our experiment and evaluation. As a result, the proposed method with the few-annotation and few-shot settings obtained 5 to 20 points improvement of accuracy than that of the Faster R-CNN with the few-shot settings on AP50, and the model converges earlier 50–200 epoch than that of Faster R-CNN. However, the few-shot model with the few-shot setting obtains a higher performance than the few-shot and few-annotation settings on AP50 and converging time.
Product Selection Support System Based on Ordered Structure by Formal Concept Analysis
Kazuki AIKAWA and Hajime NOBUHARA
With the spread of electronic commerce, it is necessary to find, compare, and select products from a wide variety of products. In a real shop, we can ask staff, but in an online shop, you have to investigate and compare by yourself. In a large-scale net shop, it is possible to accumulate behavior data of many users and make a proposal, but it is difficult to use a similar algorithm in a small-scale net shop because the amount of data is small. In this paper, we propose a recommendation algorithm for small datasets by focusing on the ordered structure obtained by formal concept analysis. Experiments on two datasets confirmed that some recommendation is possible and that performance is improved by using the sequential structure obtained by formal concept analysis.
Personal Values Modeling with Rough Sets for Collaborative Filtering
Yoshihito KOSAKA and Kazushi OKAMOTO
This study proposes models to apply recommendation method focusing on personal values to a recommendation explanation. The proposed models use rough sets theory, and the number of extractable If-Then rules can be increased compared to previous studies. The performance of the proposed models is experimentally evaluated and compared to that of the conventional collaborative filtering model in terms of the score prediction accuracy of items, coverage of items, and computation time. The model with the highest accuracy in the proposed models achieves 0.140 for MAE and 0.157 for RMSE smaller than the conventional one. In addition, the proposed models can calculate the similarity between users in 1/7 to 1/4248 of the time compared to the conventional one. The experimental results indicate that the recommendation accuracy is improved by using the actual score as it is without reducing the rating to a binary value, positive or negative. In addition, the proposed models are more effective for datasets with a large number of items in terms of computation time.
Genetic Algorithm Based Automatic Layer Selection of Transfer Learning for Object Detection
Ryuji ITO, Hajime NOBUHARA, and Shigeru KATO
A method for automatic re-learning layer selection based on a genetic algorithm is proposed to solve the difficulty of conventional transfer learning of deep learning-based object detection models. The genetic algorithm of the proposed method can select the re-learning layers automatically in the transfer learning process instead of a trial-and-error selection of the conventional method. A transfer learning experiment from the COCO dataset to the Global Wheat Head Detection (GWHD for short) dataset was performed using fine-tuning and the proposed method, and the results were compared. Using the training data and the validation data of the GWHD, we compare the mean average precision of the models trained by the conventional and the proposed methods, respectively, on the test data of the GWHD. It is confirmed that the model trained by the proposed method has higher performance than the model trained by the conventional method. The average of mAP of the proposed method, which automatically selects the re-learning layer (≃0.603), is higher than the average of mAP of the conventional method (≃0.594). Furthermore, the standard deviation of results obtained by the proposed method is smaller than that of the conventional method, and it shows the stable learning process of the proposed method.
A Comparative Study on Statistical Method and Neural Network in COVID-19 Forecasting
Naoki DOHI and Yukinobu HOSHINO
This study about forecast Japanese confirmed cases of the novel coronavirus to assist in decisions. There are statistical models and machine learning models for forecasting the time series data. Statistical models performed better than machine learning models. The experiment results were confirmed by both comparisons. Therefore, this paper would like to report the forecast confirmed cases of the novel coronavirus. SARIMA (Seasonal AutoRegressive Integrated Moving Average) and RNN (Recurrent Neural Network) are compared by RMSE (Root Mean Square Error). Results show that RNN (with vector inputs) was better than statistical models.
Experimental Analysis of Injection Attacks of Various Recommendation Systems Using Real Data
Soichiro HASHIMOTO and Hajime NOBUHARA
Recommendation systems play an important role in modern applications such as Netflix, Amazon, and e-commerce applications. Although the research for improving the accuracy of the recommendation system is increasing because of this importance, the risks in the latest recommendation system have not been sufficiently studied, and the importance of the recommendation system is increasing, and the attack to the improper system of the recommendation by the posting of the false review becomes a problem. The economic impact of the attack on the recommendation system is very large, and it is said that the purchase number of the item fluctuates by 5 to 9% depending on the increase and decrease of one star for the item evaluated by 5 stages. However, in a simple recommendation system, it is difficult to distinguish between a fake user and a normal user, and an algorithm to prevent attacks is required. In this paper, we focus on “injection attacks” among attacks on recommendation systems. An overview of the injection attack is shown in Figure 1. In the injection attack, an attacker creates a profile of a fake user from the data and injects it into a data set, and the data set is learned by the recommendation system. Learning without knowing the attack affects the recommendation function, and there is a risk of recommending different items. Although various studies have been conducted to verify the characteristics of such attacks, in the process of creating false data, the effects of optimization algorithms on attack performance have not been well studied. In this paper, we investigate the attack performance of Bi-Level Optimization.
Multi-Task Planning of Heterogeneous UAVs Based on Indoor Topological Map
Ruowei ZHANG, Lihua DOU, Bin XIN, and Hao ZHANG
The high efficient task assignment and fast path planning for small unmanned aerial vehicles (UAVs) indoor task planning play a crucial role. Considering the complex indoor environment and multi-constraints on UAVs, the paper focuses on the problem of multi-task planning of heterogeneous UAVs with different abilities based on the indoor topological map. First, we model this problem as a multi-objective bi-level optimization problem. The objectives include the completion rate of the tasks and the consumption of UAVs performing the tasks. Then, the constraints on UAVs in an indoor environment are analyzed and the topological map is applied to the UAVs’ path planning. The problem is solved by using four multi-objective optimization algorithms including NSGA-II, SPEA2, MOEA/D, and MOPSO. Finally, computational experiments are conducted with test instances of different scales. The experimental results show that NSGA-II and SPEA2 can find significantly better Pareto fronts.
A UAV Swarm Collaborative Optimization Algorithm to Predict the Perception of Fire
Zhichao CAO, Bo LIU, and Haoyu ZHOU
To improve the accuracy of fire information collection, in this paper, a kind of UAV swarm cooperative sensing forest fire prediction algorithm that based on bee colony algorithm and combined with Jiugongge fire development prediction model is proposed. The UAV group’s task planning, queue planning and route planning through the target perception information are realized in the algorithm, cooperatively perceives the fire trend and tracks the fire, and uses the sensor to collect the data, which is sent back to the console, and the console analyzes the data to guide the firefighters to rescue. Experimental simulation shows that the accuracy of fire prediction reaches 81.8%. Compared with single UAV, the information collected by UAV group is more accurate and more suitable for complex environment.
Multi-Vehicle Cooperative Reliability Assessment of Urban Rail Transit
Guishuang TIAN, Shaoping WANG, Jian SHI, and Yajing QIAO
As the main way to solve urban public transportation problems, urban rail transit was widely used with the characteristics of energy saving, high traffic density, full-time and less pollution. However, multi vehicle operation is easily affected by random factors such as climate and environmental change. The reliability and safety of multi vehicle operation is especially important. This paper establishes a reliability model of multi vehicle cooperation by analyzing the braking process of cooperative vehicle and investigates the safety conditions that need to be met. Based on the safe running distance of vehicle, the two-vehicle cooperative operation model and unified reliability model are built. To analyze the influence factors of reliability model, the communication delay, driving distance, relative speed and braking performance are studied under multi-vehicle cooperation. The results show that above four factors impact on the safe braking of the vehicle, especially to the communication delay. The proposed reliability model can accurately evaluate the reliability of the vehicle’s cooperative braking process and ensure the safe operation.
The Behavior Design of Swarm Robots Based on a Simplified Gene Regulatory Network in Communication-Free Environments
Yuwei CAI, Guijie ZHU, Huaxing HUANG, Zhaojun WANG, Zhun FAN, Wenji LI, Ze SHI, and Weibo NING
Aiming at the problem of frequent failure of swarm robots encirclement strategy in the battlefield environment without communication and unknown environment, this paper proposes a model named S-GRN (Simplified Gene Regulation Network) based on individual cognition, which make swarm robots track and entrap targets in communication-free environments. FSM (Finite-State Machine) model is designed to guide the behavior mode of robot and achieve effective control of swarm robot. Based on the above ideas, the behavior mode of swarm robots in communication-free environments and the emergence method of swarm aggregation form are designed. This method is a distributed control method. Swarm robots recognize the approximate orientation of targets through their own visual sensors, and measure the orientation of obstacles with laser sensors. These information are used as the inputs of S-GRN, then output is target entrapping pattern. Through the control algorithm based on FSM, each robot moves to the target and reaches the pattern point around the target. Finally, as the robot gathers towards the target, cluster tracking and encirclement forms emerge. The effectiveness of this method is verified by experiments.
Hexagonal War Chess Bot Using Memorized Search and Greedy Strategy
Songqiang XU, Hongbin MA, and Weipu ZHANG
In this paper, we present a robot program for a special hexagonal war chess game that can expand, explore and attack automatically. First, we introduce the rules and process of the hexagonal war chess game. Then, we theoretically analyze the requirements and characteristics of the robot algorithm on the basis of the rules of the game, and then implement the robot by memorizing search and greedy strategy. Through the experiment of simulating the battle between each other, it is verified that our robots have strong fighting power and have high rapidity and accuracy in attacking. To sum up, the memorized search and greedy strategy are practical and effective to improve the aggression of the robot in this game.
Dynamic Integrated Flexible Job Shop Scheduling with Transportation Robot
Yingmei HE, Bin XIN, Sai LU, and Yulong DING
The integrated scheduling problem for machines and transportation robots in flexible job shop is a complex but valuable problem. In this paper, the dynamic integrated scheduling problem considering breakdowns, order insertions and battery consumption of robots is studied, which is aiming at minimizing the order completion time (makespan). Adopting an event-driven global rescheduling strategy, three algorithms are designed, including the Genetic Algorithm (GA), the Improved Variable Neighborhood Search (IVNS) algorithm, and the Memetic Algorithm (MA). Finally, numerical experiments are carried out to test the performance of the algorithms. The effectiveness of the rescheduling strategy is verified under dynamic situations.
An Improved Two-Stage Network for Video Virtual Try-On
Yongfeng ZHANG, Zhongjian DAI, Zhiyang JIA, and Yaping DAI
In order to solve the problem that the picture-based virtual try-on model provides consumers with limited information, an improved two-stage video virtual tryon scheme based on deep neural networks is proposed. The network consists of two parts. One is a deep network used to learn Thin Plate Spline (TPS) deformation parameters of clothing, the other is a U-Net module used to generate the try-on effect. In the latter, the network extracts optical flow from the input data, performs DensePose pose annotations, trains on the improved U-Net, and outputs the frame-by-frame tryon effect. Compared with the existing work, the proposed solution obtains a higher quality video, which is embodied in that the facial details retained are more adequate and the edges of the clothing generated are better. The proposed approach is evaluated on VVT and VITON dataset. In the same test sample, the proposed network has a better visual effect than the current neural network-based try-on work.
A Variable-Small-Filter-Size Residue-Learning Dense CNN for Reconstruction of HEVC Video Frames
Huanhuan CHAI, Zhaohong LI, Zhenzhen ZHANG, and Shutong XU
The in-loop filter module of High Efficiency Video Coding (HEVC) standard improves the reconstruction quality of compressed video frames, but it also brings bitrate increasing. In this paper, we aim to replace the existing in-loop filter module of HEVC with convolutional neural network (CNN) to facilitate HEVC intra coding performance on both visual quality and bitrate. First, two consecutive 3 × 3 convolutional layers are adopted instead of original 5 × 5 convolutional layer in Variable-filter-size Residuelearning CNN (VRCNN) to increase the nonlinearity and expression ability, then we incrementally utilize dense connection to boost unimpeded information flow among three blocks. Finally, the proposed reconstruction network called Variable-Small-filter-size Residuelearning Dense CNN (VSRDCNN) is obtained. The dataset is gotten by HEVC compression which turns off the in-loop filter module with four quantization parameters (QPs). In a progressive way, the weights of VSRDCNN on the highest QP 37 are obtained by training and are used as initial weights for VSRDCNN on the other three QPs. At last, the trained CNNs are used to replace the in-loop filter in HEVC to get better restoration performance. The proposed VSRDCNN is validated both subjectively and objectively via extensive experiments on HEVC standard test sequences. Experimental results show that the proposed VSRDCNN outperforms HEVC 0.30 dB on BDpsnr and 0.51% reduction on BDrate, and achieves the lowest BDrate compared with the state-of-the-art work.
Exploring Effective Channels in Fundus Images for Convolutional Neural Networks
Shoya KUSUNOSE, Yuki SHINOMIYA, and Yukinobu HOSHINO
This paper focuses on useful channel information for automated diagnosis using fundus images, especially for disease classification using convolutional neural networks (CNNs). In general, only the green channel of the image is used for the analysis of fundus images, and the green channel image is processed in various ways to analyze. The reason for this is that it is difficult to capture features such as blood vessels and optic nerve papillae from other channels. However, CNNs have the potential to acquire features that are difficult for humans to capture because they acquire features in the image by learning. We trained CNNs on fundus images for each combination of channels and compared their accuracy. As a result, we found that the appropriate channel varies depending on the disease, and the green channel is mainly accurate. In addition, the results of learning the appropriate ratio of channels using depth-wise convolution showed that green and red channels were enhanced, and from these results, we considered that the green and red channel are useful in the fundus classification.
Deep Convolutional Networks with Genetic Algorithm for Reinforcement Learning Problem
Mohamad YANI and Naoyuki KUBOTA
The principles of reinforcement learning present a normative account firmly related to neuroscience and psychological viewpoints on how animals or humans survive and find their optimal state-action values of an environment. In order to use reinforcement learning successfully in conditions approaching real-world application complexity, however, agents are confronted with a challenging task: they need to obtain correct information of the environment from various kinds of sensors and manage these to generate optimal state-action values from experience to new conditions and also for long-term survival. Several dedicated approaches have been developed to improve reinforcement learning performances – DQN, Double DQN, SARSA name a few. Since reinforcement learning tasks require maximizing a reward function for the long term, we consider them as challenging optimization problems. Classical deep Q-network (DQN) with Backpropagation (BP) can solve challenging reinforcement learning problems like classic Atari games and robotics problems. However, DQN with BP usually takes a long time to train and difficult to get convergence in a short training. In this paper, we optimize DQN with Genetic Algorithms (GA) for a reinforcement learning problem. We also provide comparison results between DQN with GA and traditional DQN to show how efficient this method is compared to the standard DQN. The results demonstrate that DQN with GA has better results on CartPole problem.
IDRLnet: A Physics-Informed Neural Network Library
Wei PENG, Jun ZHANG, Weien ZHOU, Xiaoyu ZHAO, Wen YAO, and Xiaoqian CHEN
Physics Informed Neural Network (PINN) is a scientific computing framework used to solve both forward and inverse problems modeled by Partial Differential Equations (PDEs). This paper introduces IDRLnet, a Python toolbox for modeling and solving problems through PINN systematically. IDRLnet constructs the framework for a wide range of PINN algorithms and applications. It provides a structured way to incorporate geometric objects, data sources, artificial neural networks, loss metrics, and optimizers within Python. Furthermore, it provides functionality to solve noisy inverse problems, variational minimization, and integral differential equations. New PINN variants can be integrated into the framework easily. Source code, tutorials, and documentation are available at https://github.com/idrl-lab/idrlnet.
Analysis of Trained Convolutional Neural Network Using Generative Adversarial Network
Yasuyuki TSUTSUI, Yuki SHINOMIYA, and Shinichi YOSHIDA
In recent years, the increasing burden on doctors due to the shortage of doctors has become a problem in the medical site, and CNN-based methods that can realize highly accurate diagnosis by image recognition are attracting attention as a method to automate diagnosis to ease the burden on doctors. However, in the medical site, it is required to provide explanations to patients, and CNN-based methods have not been introduced to the site because it is difficult to explain the results. Therefore, we proposed a method using Attention-Guided CycleGAN as a method to analyze the differences in regions and patterns recognized by CNN for the explanation of diagnosis using CNN, and evaluated the validity of analysis from the results of the transformation, the similarity of regions of focus, and the effectiveness of transformation for diagnosis using CNN. The results show that Attention-Guided CycleGAN may be effective for the analysis of CNN, because the transformation results are in line with symptoms between cardiomegaly and asymptomatic patients, and be also effective for diagnosis by CNN.
M2-6-1![]()
An Improved Denoising Method for Lidar Echo Signal
Xiaomeng LIU, Cong HUANG, Hongbin MA, and Qinyong LIU
Design and Validation of an Evaluation Function Using the GA for the Fuzzy Inference of the Action Chain Search in RoboCup2D
Keigo YOSHIMI and Yukinobu HOSHINO
In fields such as Go and Shogi, the usefulness of artificial intelligence has been recognized. How- ever, it is impossible to apply the knowledge gained there to real world problems. If artificial intelligence can be applied to real-world problems, the possibilities for artificial intelligence will expand even further. Therefore, in order to set up a problem close to the real world, we used the “RoboCup Soccer Simulation 2D League” as the subject of our experiment and aimed to improve the strength of the team using artificial intelligence. Experiments were conducted using fuzzy inference methods and genetic algorithms. In this paper, we will design an evaluation function to improve the strength of teams, and examine the usefulness of artificial intelligence-based teams based on the competitive performance of the designed teams.
A Clustering Method Based on Gaussian Process Regression and Fuzzy c-Means Algorithm
Maolin SHI and Zihao WANG
With the development of measurement techniques, massive data have been recorded from real-world systems, and partitioning these data can provide important information and useful references. In this paper, a new clustering method named GPR-FCM is proposed to accomplish this work. The proposed clustering method is developed based on fuzzy c-means algorithm. The regression relationship of data instead of the distance among the objects is utilized to evaluate the difference between the clusters, and Gaussian process regression (GPR) is used to evaluate the regression relationship of each cluster. A series of experiments on synthetic and engineering datasets are used to evaluate the performance of the GPR-FCM method. The results demonstrate higher effectiveness and advantages of the GPR-FCM method compared with conventional data clustering algorithms.
Fuzzy PI Model Predictive DTC for Gas Pressure Regulated Power Generation System
Dong WEI, Ruo-Chen ZHAO, Ya-Xuan XIONG, Ming-Xin ZUO, and Hao-Qing ZHANG
In the gas supply system, the pressure regulation system is required to regulate the gas from high pressure to low pressure on the customer side, where the pressure energy can be recovered by the expander driven generator operation. However, the existing regulator system and generator torque control loop have the problem of difficult PI parameter adjustment, in addition to the strong non-linearity of the hysteresis comparator and switching table in the traditional direct torque control, which causes difficulties in controller design and leads to large fluctuations in generator torque. To this end, this paper constructs fuzzy PI controllers for expander pressure regulation and generator torque control loops respectively, and realizes adaptive adjustment of PI parameters; meanwhile, with the control objective of making the generator torque and flux linkage stable, the optimal voltage vector calculation is performed directly by using model predictive controller instead of the hysteresis comparator and vector switching table in the generator internal loop control loop, which improves the efficiency of the algorithm and improves the control performance by delay compensation. The simulation experimental results show that the proposed control algorithm reduces the generator torque fluctuation range by 84.5%, the speed fluctuation range by 66.7%, and the three-phase current fluctuation range by 65.6% compared with the traditional direct torque control algorithm.
Noise Reduction by Fuzzy Inference Based on α-Cuts and Generalized Mean: A Feasibility Study
Kiyohiko UEHARA
A method for noise reduction is proposed on the basis of a fuzzy inference method called α-GEMII. It is named α-GEMII-X denoising in this paper. α-GEMII-X denoising reduces noise in learning data by iteratively performing α-GEMII. α-GEMII-X denoising makes it possible to unify fuzzy inference and preprocessing to optimize fuzzy rules with noise-corrupted data. A method is also proposed for the determination of the timing when to terminate the iterative process by effectively using the properties of α-GEMII. Numerical results indicate that noise is properly reduced at the termination timing determined by the proposed method. They prove that α-GEMII-X denoising is feasible in practice.
A Multi-Stage Feature Fusion Network for Human Pose Estimation
Zhipeng CHENG, Kaoru HIROTA, Yaping DAI, and Zhiyang JIA
A multi-stage feature fusion network is proposed for the human pose estimation task, the process of recognizing human keypoints in a given image. The proposed method consists of there parts: the multi-stages network, the cross stage feature aggregation and the intermediate supervision with online hard keypoints mining (OHKM) strategy. The multi-stage network is designed to learn the deep spatial relations among keypoints through repeated feature fusion process, which contributes to locating keypoints. In order to avoid losing information in the repeated feature fusion process, the cross stage feature aggregation is adopted to provide shallow features from previous stage to next stage. Furthermore, the intermediate supervision with OHKM is employed in each stage to refine the pose localization accuracy and promote the training speed of network. The experimental results on two public datasets, 75.6 AP on COCO and 92.3 PCKh@0.5 on MPII, demonstrate the effectiveness of the proposed multi-stage feature fusion network.
An Efficient Adaptation Method for Model-Based Meta-Reinforcement Learning
Shiro USUKURA and Hajime NOBUHARA
We propose an efficient adaptation method for model-based meta-reinforcement learning by combining two conventional methods. Model-based meta-reinforcement learning can achieve high performance by adapting observed data in every time step in unstable environments. There are two conventional adaptation methods for model-based meta-reinforcement learning which are KShot-adaptation method and the Continued-adaptation method. These methods have similar algorithms, but different characteristics. KShot-adaptation method tends to underfit observed data, while Continued-adaptation method tends to overfit it. Therefore, we propose a method that combines these two conventional methods by introducing a new parameter. We conducted evaluation experiments in a half-cheater-disable-joint environment that reproduces changes of dynamics by disabling the joints. As a result, our method obtained an average reward of 3.9% higher than the KShot-Adaptation method and 31% higher than the Continued-Adaptation method.
Soft-Voting-Based SVM-KNN Algorithm and its Application in Big Data Modeling
Zhihong WANG, Hongru REN, Renquan LU, and Wenhao LIU
Recent years have witnessed the surge of interest of big data model predictions in various fields. How to improve the accuracy of big data models has become an important issue. Most of the existing big data models use a single algorithm or its improved version. Using the Support Vector Machine (SVM) algorithm and the K-Nearest Neighbor (KNN) algorithm as the base classifiers, this paper aims to the soft voting method in ensemble learning to establish a combined model of SVM-KNN. A comparative experiment on the proposed algorithm and the single algorithm is performed, which show that the SVM-KNN combined model has better performance in the four model evaluation indicators of accuracy, precision, recall, and F1 score.
Separable Algorithms for Matrix Factorization with Presence of Missing Data
Shi-Xin WANG, Min GAN, and Guang-Yong CHEN
Low-rank matrix factorization (LRMF) frequently appears in various tasks in computer vision, e.g., bundle adjustment. Singular value decomposition (SVD) is a well-known approach to solve LRMF. However, it fails when the matrix is relatively large or the elements of target are lost. In this paper, we formulate the LRMF as a separable nonlinear least squares problem. An iterative algorithm, a combination of variable projection (VP) algorithm and BFGS method (named VP-BFGS), is proposed to solve this problem. The algorithm first utilizes the VP strategy to eliminate part of the parameters (i.e., a matrix), and then the BFGS method is used to estimate the other matrix. In numerical experiments, compared with the joint method, Gauss-Newton method and LM method, the VP-BFGS method achieves competitive performance, especially when the ratio of deficiency to existence is high.
Conditional Motion and Content Decomposed GAN for Zero-Shot Video Generation
Shun KIMURA and Kazuhiko KAWAMOTO
We propose a conditional generative adversarial network (GAN) model for zero-shot video generation. In this study, we have explored zero-shot conditional generation setting. In other words, we generate unseen videos from training samples with missing classes. The task is an extension of conditional data generation. The key idea is to learn disentangled representations in the latent space of a GAN. To realize this objective, we base our model on the motion and content decomposed GAN and conditional GAN for image generation. We build the model to find better-disentangled representations and to generate goodquality videos. We demonstrate the effectiveness of our proposed model through experiments on the Weizmann action database and the MUG facial expression database.
The Cars’ Type Recognition Algorithm Based on Ensemble Learning and Multi-Features Fusion
Bin CAO, Jiahui WANG, Hongbin MA, and Ying JIN
The automobile industry is an important industry in the national economy. It has the characteristics of long industrial chain, high accuracy and integrating all kinds of high and new technologies. It has played a leading role in the national economic and social development and the cars’ type recognition plays an important role in automobile intelligent manufacturing. Some scholars are studying the application of deep learning algorithm for cars’ type recognition. However, the problems of lacking samples and high accuracy make it difficult for a single deep learning technology to meet needs from production. Based on the important industrial scene of cars’ type recognition, this paper integrates a variety of image features under the framework of ensemble learning based on the in-depth understanding of automobile intelligent production lines and improves the existing ensemble learning algorithms so as to design a cars’ type recognition algorithm based on multi-features fusion and ensemble learning. The algorithm can meet the stringent requirements of industrial applications and has low dependence on samples, which makes the algorithm have a certain value of popularization in automobile manufacturers. The algorithm proposed in this paper has achieved good results in automobile intelligent production line. Compared with algorithms using single feature, the accuracy of proposed algorithm is higher.
M2-7-6![]()
Feature Contribution in Accidents Severity Based on Light GBM-TPE
Kun LI and Haocheng XU
Characteristic Behavior: Identifying Body Spatial Trajectory Structure in Indoor Skiing
Peizhang LI, Qing FEI, and Xiaolan YAO
Indoor skiing training is one of the ways to improve athletes’ sports level in non-snow season. In order to train more scientifically, it is necessary to extract the main features of the skiing process and analyze and generate guidance opinions. In this paper, we used the video to extract the three dimensional space coordinates of the athlete’s body, and constructed the P matrix based on this. Through the principal components of the complete sports behavior data (P matrix), we obtain the main characteristic behaviors of athletes. Our experiment shows that the main characteristic behaviors can better reconstruct and predict the ski space trajectory, and further, these main characteristic behaviors can be used to evaluate the skiing level of individual athletes. In addition, we also studied the application of the main characteristic behaviors of skiing in groups. We dig out the group characteristics of different groups and use them to calculate the degree of belonging between individuals and groups. Furthermore, the mapping of different individuals on group characteristics can better reflect the degree of intimacy between different individuals. With the continuous enrichment of horizontal data sets, we hope that this technology can be applied to various sports.
Automating Stroke Subtype Classification from Electromagnetic Signals Using Principal Component Methods
Jinrui LI, Guohun ZHU, and Min XI
Stroke is an emergency. Automatic stroke classification based on electromagnetic images needs to establish a large correlation matrix array which leads to low computational performance. The paper presents a principal component analysis (PCA) to extract the efficient features to conduct a fast stroke subtypes classification. Firstly, it is shown that stroke classification using a single feature was failed. By discovering the data pattern associated with correlations, the second attempt has proposed a novel PCA feature extraction method, the result has achieved 99% accuracy after the application of PCA and SVM on the extracted features.
Scene Classification Based on Visual Feature Channels and SVM
Mingzhao LI and Zhiyan WANG
Nowadays, scene classification is widely used as the pre-classification of target detection and behaviour detection, and it is an essential part of computer vision. In this paper, an improved scene classification method is proposed. This method firstly uses the naturalness in the spatial envelope model to classify scenes into base classes. It then classifies scenes more carefully through the visual feature channel model to obtain specific scene categories. Simulation experiments show that, under the exact condition of the SVM classifier, the improved scene classification method in this paper is better than the traditional scene classification method for scene classification. On this basis, the parameters of the SVM classifier are optimized for specific data sets.
Research on Classification of Nutrient Forage Species Based on VGG-16 Network
Jvsong HUANG, Jiandong FANG, Yudong ZHAO, and Bajin LI
Aiming at the problem of time-consuming, labor-intensive and inaccurate forage recognition traditionally relying mainly on manual direct observation and manual feature extraction, a nutritional forage classification model based on improved VGG-16 convolutional neural network is proposed. Based on the VGG-16 network model, the model optimizes the number of fully connected layers, and replaces the SoftMax classifier in the original VGG-16 network with a 5-label SoftMax classifier, optimizes the model structure and parameters, and shares the pre-trained model through migration learning the weight parameters of the middle convolutional layer and the pooling layer. Five types of nutrient forage images were collected from the forage experimental field in Siziwang Banner as the training data and test data of the classification model. The experimental results show that the model can accurately classify the five types of forage. In terms of the average recognition accuracy rate, the accuracy rate reached 91.3%, realizing the accurate classification of nutrient forages.
Patient Classification Based on sEMG Signals Using Extreme Gradient Boosting Algorithm
Juan ZHAO, Jinhua SHE, Dianhong WANG, and Feng WANG
Studying surface electromyography (sEMG) signals of the muscles near the knee joints in patients with gonarthritis is helpful for the diagnosis of knee joint inflammation. If the influence of different sEMG signals and their weights on knee inflammation can be analyzed through machine learning methods, it will greatly improve diagnostic accuracy. The extreme gradient boosting (XGBoost) algorithm is an excellent machine learning algorithm. Inspired by this algorithm, we presented a signal classification method based on the XGBoost algorithm to distinguish between patients with gonarthritis and healthy subjects. The sEMG signals collected from four muscles around the knee are extracted as features, which are used as the input variables to the classification model. The XGBoost algorithm determines the output by improving the objective function based on sample proportion and weight. The experimental results show that the XGBoost algorithm has higher accuracy and better classification performance when compared with the support vector machine (SVM) and the deep neural networks (DNN) algorithms. This indicates that the advantage of the XGBoost algorithm on classifying patients with gonarthritis based on sEMG signals.
Distributed Micro-Displacement Monitoring System for Detecting Pier Settlements
Jiahao SONG, Huafeng LI, and Xiao HE
In the construction of large-scale structures, monitoring the displacements increases security and reliability. The existing measuring methods, whether manual techniques or automatic instruments cannot deal with large quantities of objects to be measured. In order to address this problem, we develop a distributed measuring system for detecting micro-displacements to boost precision and automaticity. To reduce the influence of measurement noise, we also develop an algorithm on the basis of linear data reconciliation. The system has already been applied to detecting pier settlements of viaducts used by high-speed railways and proves to be capable to detect displacements with high precision.
An Unsupervised Learning Method for Industrial Anomaly Detection Based on VAE-LSTM Hybrid Model
Hengshan ZONG, Haolong ZHANG, Ning JIA, Maohua GONG, Hengmin DONG, and Zeyu JIAO
Anomaly detection is one of the most important tasks in industrial production, and it is a crucial aspect for both safety and efficiency of modern process industries. However, due to the high-dimensional characteristics of time series perception data and the difficulty of data labeling in actual production, there is still a lack of effective anomaly detection methods in industrial scenarios. To solve the above challenges, this research proposes an unsupervised learning method based on a hybrid model of Variational Autoencoder (VAE) and Long Short-term Memory (LSTM). First of all, high-dimensional industrial data is processed by VAE, not only achieves dimensionality reduction and feature extraction, but also reduces the impact of noise. Then the LSTM network is exploited to mine the temporal features of the industrial data and predict the subsequent change trend. Finally, when the difference between the predicted data and the actual measured data exceeds a certain threshold, the production process can be considered abnormal.
Tablets Defect Detection Based on Improved ResNet-CBAM
Yanan LIU, Maofan CHENG, Hongbin MA, and Ying JIN
Due to the lack of feature expression ability of traditional image processing methods, it is difficult to identify small defects such as foreign bodies and scratches on the surface of tablets. Aiming at this problem, this paper proposes the use of a deep learning method fused with attention mechanism to realize the defect detection of tablets. Improve the recognition effect of deep learning network by introducing Convolutional Block Attention Module (CBAM). In order to further reduce the complexity of the model and improve the detection accuracy, this paper improves the original CBAM module. Firstly, it is proposed to use one dimensional convolution instead of the fully connected layer in the CBAM channel attention module to capture channel attention information; Secondly, in order to improve the ability of the attention module to extract features of different proportions of defects, the use of multiscale dilated convolution is proposed. Instead of the 7 × 7 convolution in the original CBAM spatial attention module, it aggregates multiscale spatial information while reducing model parameters. Experimental results show that compared with the original CBAM module, the improved visual attention module can more effectively improve the ability of network feature extraction and meet the real-time requirements.
Research on Security Inspection Method Based on Terahertz Imaging and Convolution Neural Network
Bo-Yang JIN, Fang YAN, and Tong-Hua LIU
According to the requirements of safety inspection in public places such as railway stations and airports, a dangerous goods identification method based on convolution neural network algorithm of terahertz transmission imaging technology and target detection is proposed. The research results show that the average value (MAP) of each category of AP can reach 65.02% and the average detection speed is 22.5 ms when the algorithm is trained by the self-constructed terahertz dangerous goods detection data set. In most public places the detection speed and accuracy of this method can meet the requirements of security check work, providing technical support for the research and development of security check equipment based on terahertz imaging technology.
Suppression of Disturbances in Networked Control Systems Based on Adaptive Model Predictive Control and Equivalent-Input-Disturbance Approach
Meiliu LI, Jinhua SHE, Zhen-Tao LIU, Wangyong HE, Min WU, and Yasuhiro OHYAMA
This paper presents an adaptive control strategy to compensate for packet losses, time delay, and exogenous disturbances in a networked control system (NCS). An adaptive model predictive controller (AMPC) combined with an equivalent-input-disturbance (EID) estimator to improve the control performance in the structure of an NCS. We use the AMPC to design an adaptive rate, which guarantees the control performance and the tracking performance of the controlled plant with time delay. The EID estimator compensates for the exogenous disturbances and pocket losses. A comparison with the conventional EID approach through the experiments demonstrates the validity of the AMPC-EID control method.
Event-Triggered Predictive Control for Networked Systems Using Allowable Time Delays
Zhong-Hua PANG, Zhen-Yi LIU, Zhe DONG, and Tong MU
In this paper, an event-triggered networked predictive control (NPC) method is proposed for a networked control system with random network delays, packet disorders and packet dropouts in the feedback and forward channels, which makes full use of the allowable time delay of the system. In this method, these random communication constraints are uniformly treated as time delay. Then the controller is designed by the time-delay state feedback control law, and the event-triggered NPC method is used to actively compensate for the part of the network delay that exceeds the allowable time delay. In addition, the introduction of an event-triggered mechanism reduces the communication load and saves network resources. A necessary and sufficient stability condition is derived for the resulting closed-loop system, which is independent of random time delays and related to the allowable time delay. Finally, the effectiveness of the proposed method is verified by simulation results.
The Proposal of Region Proposal Method for Outdoor-Camera’s Image by Fuzzy Inference System
Junsuke YOKOSEKI and Yukinobu HOSHINO
In recent years, wild monkeys have been damaging crops in field area in Japan. Since monkeys live in groups, it is necessary to capture all the monkeys in a group to prevent damage. Therefore, we need a system that can detect when a group of monkeys enter a trap by using image recognition. The goal of this research is to detect a group of monkeys by image recognition. We expect to use images from a fixed-point camera installed in an outdoor cage which capture monkeys. The problem with these images are that the color distribution changes dynamically over time by sunlight. In this paper, we propose a method for extracting the regions in an image that contain monkeys. This method converts the image to L*a*b* color space and extracts the regions by fuzzy inference. The result shows that the proposed method is an effective region proposal method. In general, fuzzy reasoning requires less computation and reduces the entropy. Since the capture system will be installed in field areas where power supply is difficult. We consider that the proposed method can assist artificial intelligence and edge computing.
Ordered Object Segmentation Based on Machine Learning Algorithms
Md Arif UDDIN, Hongbin MA, Haotian WU, and Ying JIN
The conventional automatic drug dispenser can significantly contribute to numerous services such as medicine industries, pharmacy shops and medical assistance by reducing the workload of medical workers and allowing patients to take their timely medication. In this paper, we use a segmentation technique to identify the location of drug pillboxes from the medicine shelves with the automatic counting of spiral pillboxes. The proposed method is a solution to a dynamic segmentation framework for recognizing objects from large datasets. Firstly, the picture is filtered to remove the noise to recognize the boundary line. Following that, projection lines are drawn in the center to divide the segments of pillboxes by utilizing the midpoint formula, which supports smooth counting of line detection among objects. Besides, we applied the Mean shift method to accumulate the intersection points. The key role of clustering is to collect intersection midpoints data. The proposed framework identifies the existing area from medicine pillbox images and detects the specific segmentation line that automatically allocates the pillboxes. Furthermore, we obtain 99.83% accuracy and successfully detect pillboxes, which aids in the improvement of segmentation, filtering and clustering algorithms. Such techniques assist us in recognizing the most appropriate segmentation boundary lines for further discoveries in the future.
Real-Time Object Detection in Occluded Environment with Background Cluttering Effects Using Deep Learning
Syed Muhammad AAMIR, Hongbin MA, Malak Abid Ali KHAN, and Muhammad AAQIB
Detection of small, undetermined moving objects or objects in an occluded environment with a cluttered background is the main problem of computer vision. This greatly affects the detection accuracy of deep learning models. To overcome these problems, we concentrate on deep learning models for real-time detection of cars and tanks in an occluded environment with a cluttered background employing SSD and YOLO algorithms and improved precision of detection and reduce problems facing by these models. The developed method makes the custom dataset and employs a preprocessing technique to clean the noisy dataset. For training the developed model we apply the data augmentation technique to balance and diversify the data. We fine-tuned, trained, and evaluated these models on the established dataset by applying these techniques and highlight the results we get more accurately than without applying these techniques. The accuracy and frame per second of the SSD-Mobilenet v2 model are higher than YOLO V3 and YOLO V4. Furthermore, to employ various techniques like data enhancement, noise reduction, parameter optimization, and model fusion we improve the effectiveness of detection and recognition, we also make a graphical user interface system for the developed model with features of object counting, alerts, status, resolution, and frame per second. Subsequently, to justify the importance of the developed method analysis of YOLO V3, V4 and SSD were incorporated, which resulted in the overall completion of the proposed method.
Quantum Image Resolution Enhancement Based on Quantum Wavelet Transform and Interpolation
Shan ZHAO, Fei YAN, and Kaoru HIROTA
In this study, two quantum image resolution enhancement (QIRE-I and QIRE-II) schemes are proposed based on quantum wavelet transform and quantum interpolation. The original low resolution (LR) image is decomposed into four frequency subbands using single-level 1-D quantum Haar wavelet transform (QHWT). To preserve the edges and obtain a sharper high resolution (HR) image, quantum interpolation is applied on only three high-frequency subbands. A few simulation-based demonstrations are presented to illustrate the feasibility and effectiveness of two proposed schemes. The visual and quantitative results show the superiority of the proposed schemes over those simply using quantum interpolation.
Temporal Long-Term Frame Interpolation Using U-Net Discriminator
Soh TAMURA, Shin KAWAI, and Hajime NOBUHARA
To improve the accuracy of frame interpolation over long time intervals in video data, we propose a frame interpolation model based on U-Net, which identifies each pixel. The two discriminators associated with existing interpolation methods are each extended to a U-Net configuration to discriminate videos and images for each pixel. By training the generator and discriminator based on the loss values by the U-Net, accurate image generation can be achieved. We performed comparisons on the KTH video dataset, and compared the proposed method with the conventional method. The results indicated that the quantitative scores were almost the same, however the visual evaluation revealed that the proposed method produced more accurate results.
MSRCR with SVD and Guided Filter Research for Image Enhancement and Denoising
Shuozhe ZHANG and Minling ZHU
Multi-scale Retinex with the Color Restoration (MSRCR) algorithm with perfect dynamic range compression and color constancy, can recur the content of the image which may be blur or foggy. However, multi-scale Retinex algorithms may amplify the noises in the images while processing them. It not only decreases the quality of images but also interferes with target recognition and image retrieval. The method based on the MSRCR algorithm combines with a dual noise reduction algorithm of singular value decomposition and guided filter to implement the process of noise reduction firstly, and then enhancement, and denoising again. Experiments demonstrate that our method not only does not degrade the image quality like other denoising algorithms but also effectively reduces noise and maintains the result of the multi-scale Retinex algorithm. By subjective perception and objective evaluation, our method gains a better effect than the primary multi-scale Retinex algorithm.
Nonlinear Predictive Control of a Flexible Satellite Attitude Stabilization
Yajie CHANG and Kai YAN
In this paper, a nonlinear predictive controller is designed for the attitude stabilization control system of the flexible satellite with a pair of solar panels, considering the external disturbance and the rigid flexible coupling effect in the process of satellite operation. Firstly, the estimated information of unknown disturbance is given by a nonlinear disturbance observer, and the angular acceleration information which can’t be acquired by a satellite sensor is given by a super-twisting observer. Secondly, a nonlinear predictive controller is proposed to achieve the attitude stabilization control of the flexible satellite. Simulation results show that the designed controller can effectively suppress the vibration response of the flexible appendages and realize stabilization control of the satellite attitude rapidly and efficiently.
Mixed Integer Programming Based Fuel-Optimal Guidance Strategy for Spacecraft Proximity Operations
Dawei FAN, Weiwei CAI, Leping YANG, Runde ZHANG, and Long XI
This paper presents the fuel-optimal guidance strategy for spacecraft proximity operations with collision avoidance and waypoint constraints. The relative motion dynamics is firstly given, as well as the associated discrete form. Considering the multiple waypoint constraints, the fuel-optimal and collision free trajectory planning model is developed utilizing the mixed integer programming (MIP) framework, and then addressed by the Branch-and-cut search technique. Numerical simulations of two kinds of scenarios, namely flying around a resident space object (RSO) via multiple waypoints and approaching multiple drifting RSOs, are conducted to validate the performance the proposed fuel-optimal guidance strategy.
Stochastic Output-Feedback Tracking Control with Second-Order Moment Process
Ruitao WANG, Xiaoyu XU, and Wuquan LI
This paper investigates the output-feedback tracking control problem of stochastic high-order nonlinear systems perturbed by second-order moment process. Compared with most of the existing results where only wiener process is considered, a high-gain homogeneous domination approach is used to construct the output-feedback controller. This controller ensures that the expectation of tracking error can be adjusted to be arbitrarily small and all the states of the closed-loop system are bounded in probability. Finally, a numerical example is given to demonstrate the feasibility of the control scheme.
Stability Analysis of One-Step-Guess Estimator
Zhiyu ZHAO and Hongbin MA
This paper focuses on an extremely simple adaptive method, one-step-guess (OSG) estimator, which has been ignored for a quite long time for its simple form. Previous researches have been concerned with the application of OSG in the field of adaptive control and adaptive tracking. Although the stability of the OSG has been discussed, a further investigation is necessary to analyze stability of OSG. The contribution of this paper aims at taking a deep look at the stability of OSG. The result shows that this simple estimator can be stable under mild conditions, and the error is bounded.
Kinematics Analysis and Simulation of Mobile Robot Based on Linkage Suspension
Ya CHEN, Dianjun WANG, Haoxiang ZHONG, Yadong ZHU, and Chaoxing WANG
The complex kinematics modeling of mobile robot with connecting rod suspension is studied. According to the wheel center modeling method, the kinematic characteristics of the six wheels of the mobile robot under irregular terrain are analyzed and the kinematics theoretical model is established. Then, the kinematics simulation analysis is carried out through the virtual prototype technology to verify the rationality of structural design and the correctness of the kinematics theoretical model. Finally, the error test of the mobile robot prototype is executed, the minimum deviation error of the linear motion is 4.399 mm, the forward and backward in-situ turning error is 1.166 mm and 0.838 mm, respectively. The test results show that the kinematics theoretical analysis of the mobile robot is reasonable, the robot has good motion ability. The study provides a theoretical basis for the research of high-quality navigation and control system of the mobile robot.
Web Page Remote Control for Raspberry Pi Mobile Robot Using ORB-SLAM
Jiancheng WANG, Haohui HUANG, Shi-Lu DAI, and Chenguang YANG
This paper presents a novel remote control framework for mobile robot, consisting of two core hardware systems: Raspberry Pi as the information processing computer, STM32 single chip microcomputer as the logic control computer and other auxiliary systems. Based on the mobile robot and RealSense D455 camera, Oriented FAST and Rotated BRIEF Simultaneous Localization and Mapping (ORB-SLAM3) algorithm is utilized to establish sparse map and location. The sparse map and more accurate synchronous positioning of the mobile robot environment are established. At the same time, in the actual SLAM environment map construction, we use the Web page as the interactive interface for the mobile robot’s remote control. Through the Web page, we can achieve the slow change of the position and posture of the mobile robot. Then the RealSense D455 camera can accurately obtain the surrounding environment information. Web pages are used to build human-computer interaction interface and establish remote slam map construction control, which greatly reduces the cost of system communication. And the interface is simple and easy to maintain. Finally, experiments show that the system can run stably, and the final effect is also good.
An Implementation Method of Indoor 3D Semantic Map Reconstruction Based on ORB-SLAM3
Chenxing XU, Xiaofeng LIAN, Ziwei TIAN, Maomao KANG, and Wei MA
At present, in the research field of 3D semantic map construction in indoor environment, RGB-D camera is usually applied in the most existing methods. These methods have the disadvantages of high cost and large volume, as well as all the objects of indoor environment cannot be segmented effectively from semantical point of view in order to make the robot better understand the surrounding environment. For the above reasons, this paper proposes a lightweight method for reconstructing the 3D semantic map based on the Visual SLAM with ORB-SLAM3 framework and Mask R-CNN architecture. Firstly, based on the combination of monocular camera and IMU sensor, the ORB features of key frames are extracted for tracking and constructing the local 3D map. Then the real-time pixel level semantic segmentation of the image after dynamic feature points are removed by convolutional neural network (CNN) is used to add semantic information. In the detailed implementation process, the first step is to simplify the original ORB-SLAM3 system, so that the dynamic feature points are detected and eliminated only by monocular camera in the tracking phase. The second step is to segment the object and background as well as various objects in the different categories for each key frame. Finally, the semantic database is established, the semantics information is mapped to the 3D map which can updated at the same time.
TRVO: A Robust Visual Odometry with Deep Features
Yuhang GAO and Long ZHAO
Accurate localization is crucial for visual SLAM systems. However, most visual SLAM systems use traditional hand-crafted local features to find matches in two images, which are less stable in scenes with textures-less, motion blur or repetitive patterns, and cannot achieve the goal of lifelong SLAM. In this paper, we propose TRVO, a visual odometer that uses deep learning for feature matching. The deep learning network adopts the structure of CNN and Transformer, which can produce high-quality dense matches for a pair of images in an end to end form even in indistinctive scenes, where low-texture regions or repetitive patterns occupy most areas in the field of view. After the matching point pairs are obtained, the camera pose is solved in an optimized way by minimizing the reprojection error of the feature points. Experiments based on multiple dataset and real environments show that TRVO has higher relative positioning accuracy and robustness compared with the current mainstream visual SLAM systems.
Sensorless Collision Detection for a 6-DOF Robot Manipulator
Lin CHENG, Jiayu LIU, Juyi LI, and Jianzhong TANG
Safety is a very important consideration for collaborative robot, which stands for robot working with humans. This paper proposed an improved generalized momentum observer to detect collision of AR10, a 6-DOF cooperative robot. In the experiment, the friction force is identified by employing the LuGre friction model. With friction force and gravity calculated out, collisions are detected by the modified generalized momentum observer, which can distinguish collisions from normal moves in the case that dynamic model error is large. False collisions are avoided from the difference between the target velocity and the actual velocity. The final results of experiments are significative.
A Robust Visual Inertial Navigation System Based on Low-Cost Inertial Measurement Unit
Zelong ZHANG, Kaoru HIROTA, Yaping DAI, and Zhiyang JIA
A visual-inertial system (VINS) based on vision sensor is vulnerable to environment illumination and texture, the problem of initial scale ambiguity still exists in a monocular VINS system. The fusion of a monocular camera and an inertial measurement unit (IMU) can effectively solve the scale blur problem, improve the robustness of the system, and obtain higher positioning accuracy. Based on a monocular visual inertial navigation system (VINS-mono), a state-of-the-art fusion performance of monocular vision and IMU, an initialization scheme is designed which can calculate the acceleration bias as a variable during the initialization process so that it can be applied to low-cost IMU sensors. The experimental result on the EuRoc dataset shows that the initial values obtained through the initialization process can be efficiently used for launching nonlinear visual-inertial state estimator and positioning accuracy of the improved VINS-mono has been improved by about 8% than VINS-mono.
Multi-Step Predictive Models for Excess Air Coefficient of Engine Based on TCN
Zhe ZUO, Ziyang XU, Zhenyu ZHANG, Yuheng YAN, and Ning XU
Multi-step predictive model of engine excess air coefficient combined with PID control method based on oxygen sensor can effectively control the excess air coefficient. In order to improve the model prediction accuracy of excess air coefficient and the fitting accuracy of its first derivative and second derivative, this paper builds Time Convolution Neural (TCN) multi-step predictive models of excess air coefficient. Experimental results show that three step prediction MAPE of the excess of air coefficient by TCN is 0.319%, 0.750%, 1.33%, respectively. The MAE of first-order difference and second-order difference which is calculated from excess air coefficient are 0.00738 and 0.0084 respectively.
A Combined Prediction Model Based on Double Echo State Network with Improved Immune Genetic Algorithm (IIGA)
Yuan XU, Jianlong YIN, Yanlin HE, and Qunxiong ZHU
To improve the prediction accuracy of key variables in the industrial process, a combined prediction model based on a double-reservoir echo state network with improved immune genetic algorithm (IIGA) is proposed. Firstly, a double-reservoir ESN (DESN) model is established, then partial least squares (PLS) is introduced to calculate the output weight of DESN model to enhance the ability to deal with multiple correlation issues; Secondly, in order to reduce the parameters randomness in double-reservoir and prevent the local optimization. IIGA is proposed to optimize the reservoir parameters, which introduces the opposite operator to expand the search range. Based on the above, a combined prediction model IIGA-DESN-PLS is proposed; Third, the proposed IIGA is verified by the Griewank function. And the proposed combined prediction model is applied to the purified terephthalic acid (PTA) solvent system. The comparison results show that the combined prediction model has higher prediction accuracy and provides certain guidance for predicting key variables of industrial process.
Identification of Steam Pressure Model for Once-Through Steam Generator
Yuyao HUANG, Wangyang WU, Liang LI, and Jianhua SUN
This paper presents an input-output model of once-through steam generator, which describes the relationship between feed-water pressure and steam pressure. The identification process of mathematical model combines mechanism and data modeling; model structure is determined by physical mechanism, and unknown parameters of given model are estimated via total least squares and linear optimization. Using operation data of real system, the validity of proposed model and parameter estimation method is verified. Calculation results shows that the proposed model can well interpret and predict the state of real system.
Rate and Temperature Dependent Hysteresis Online Identification for Magnetostrictive Actuator
Sicheng YI, Yuchao YAN, Huijun FAN, and Quan ZHANG
An online model identification approach is proposed to describe the rate/temperature hystereses for magnetostrictive actuator in this article. Magnetostrictive hysteresis loops show asymmetric, rate-dependent phenomena under different input currents and experimental temperatures. It is difficult to apply a comprehensive model to accurately capture such hysteresis variation. The hysteresis offline identification study is conducted. However, the rate/temperature-dependent hysteresis cannot be described well via the offline method, due to the unmodeled dynamics and external disturbances. To this end, the online infinite impulse response (OIIR) and fractional order polynomial modified Prandtl Ishlinskii (FPMPI) integrated model is utilized for the rate/temperature-dependent hysteresis identification. Comparison of the online and offline identification results shows that the hysteresis online identification results are typically better than the offline results, at the level of one order of magnitude.
Hybrid Gradient Descent Algorithms for the Exponential Autoregressive Model
Si-Min QIAN, Min GAN, and Guang-Yong CHEN
The exponential autoregressive (ExpAR) model is a powerful tool for time series analysis and system modeling. In this paper, we focus on the parameter identification methods for ExpAR model. Taking advantages of the special separable structure, the ExpAR model is decomposed into two connected sub-models and a hybrid gradient descent algorithm is proposed. The proposed algorithm exploits the underlying idea of hierarchical identification principle to estimate the linear and nonlinear parameters of the model. To improve the identification efficiency, the proposed algorithm utilizes the Aitken strategy to accelerate the gradient descent method. Some simulation results confirm the efficiency of the proposed algorithm.
Deep Neural Network and Rule Based Framework for Distributed and Flexible Job-Shop Scheduling
Guanghao XU, Huifang LI, Ruitao YANG, and Fenxi YAO
With mass customization as a state-of-the-art production paradigm under the economic globalization situations, Distributed and Flexible Job-shop Scheduling (DFJS) becomes more attractive. Taking the idea of “data-driven intelligence”, while considering the complexity of distributed and flexible manufacturing system environments under the mass customization or even one-of-a-kind production, this paper proposes an intelligent optimization algorithm based on Deep Neural Networks (DNNs) and heuristic dispatching rules. Firstly, a 3-stage scheduling model including job scheduling, operation scheduling and operation ranking, which constitutes an integrated scheduling framework is established. Then, a DNN-based scheduling algorithm is proposed to optimize job scheduling and operation scheduling. Finally, we introduce a rule-based method to optimize operation sequencing. By integrating the above two methods, the whole job-shop scheduling process can be optimized simultaneously, so as to minimize the average tardiness penalty for the whole job set.
A General Variable Neighborhood Search for the Multiple Depots Multiple Traveling Salesmen Problem
Miao WANG, Bin XIN, and Qing WANG
The multiple depots multiple traveling salesmen problem (MDMTSP) is studied in this paper. In this problem, multiple salesmen start from different depots and visit multiple cities. The objective is to find a tour for each salesman to minimize the total travel distance. A general variable neighborhood search (GVNS) approach is proposed in this paper. Three local search methods are designed in this approach, including k-reverse, k-same-as-previous, and k-same-as-next. The MDMTSP consists of two subproblems: one is to assign cities to salesmen, and the other is to solve the travel path of each salesman. The proposed GVNS approach is used to solve the first subproblem, and the second subproblem is solved by the famous Lin-Kernighan Heuristic (LKH). A state-of-the-art market-based approach is implemented as a competitor. Computational results show that the GVNS performs better than the market-based approach in 8 out of 10 instances.
Multi-Objective Scheduling Optimization for Mobile Energy Supplemented Micro-Grid
Shuai CHEN, Chengpeng JIANG, Jinglin LI, Jinwei XIANG, and Wendong XIAO
Microgrid scheduling optimization is a complex optimization problem, existing research work is mainly focused on the energy scheduling optimization and the economic benefit scheduling optimization. This paper makes use of mobile charging equipment to provide supplement energy for microgrid with insufficient energy supply, and study the electric load sequence scheduling optimization problem. A multi-objective scheduling optimization model is built by comprehensively considering the benefit from staggered peak energy storage, equipment cost, charging cost and punishment cost caused by delayed charging, and a novel particle swarm optimization algorithm is proposed to maximize the economic benefit of the microgrid. Extensive experiments verify the efficiency of the proposed algorithm, and analyze the impacts of different parameters on the economic benefit.
Multi-Objective Optimization for Meal Planning Using Multi-Island Genetic Algorithm
Takenori OBO, Takumi SENCHI, and Tomoyuki KATO
Food waste and food loss is becoming a big social problem in the world. The total amount of the household organic waste reached 2.7 million tons in 2019. The breakdown is that leftover is 27%, food thrown away before being eaten is 18%, and food scrap wasted during cooking is 55%. The main reason of throwing away food before being eaten is best-before date expiration. In this study, we aim to develop a recommender system for meal planning in a family. In practice, such recommender systems are required to not only extract user’s preferences but also suggest meal plans on the basis of caloric intake, remaining amount of food and expiration dates. This boils down to a multi-objective optimization problem. This paper therefore presents a method of multi-objective optimization for meal planning and recommendation. We use a multi-island GA to deal with the optimization problem and propose a framework of content-based recommendation where the user can interactively rate the menu candidates. Moreover, we design the objective functions to minimize the amount of expired food and adjust caloric intake. Furthermore, we conduct a preliminary experiment to discuss the applicability of the proposed method.
An Ant Colony Algorithm for Electric Vehicle Routing Problem with Load Energy Consumption
Enqi LIU, Yaping DAI, and Hongfeng WANG
For solving the impact of load energy consumption in electric vehicle routing problem, an ant colony algorithm is realized in this paper. By adjusting three different pheromone update methods, the solution speed of the algorithm is improved, and the solution result is obtained when the objective function is minimized. The comparative simulation experiment analysis shows that the pheromone is initialized once, the incremental method is one step by step, and the volatilization method is global volatilization. The optimal route length value of this pheromone update strategy is at least 19% better than the strategy of other combinations in the paper.
A Comparative Study on Evolutionary Algorithms for High-Speed Railway Train Timetable Rescheduling Problem
Shuxin DING, Tao ZHANG, Rongsheng WANG, Chunde ZHANG, Sai LU, and Bin XIN
In this paper, a high-speed railway train timetable rescheduling (TTR) problem is presented, addressing the adjustment of the train timetable with a complete blockage in the station according to the train operation constraints. Four competitive evolutionary algorithms (EAs), i.e., a dual-model estimation of distribution algorithm (DM-EDA), self-adaptive differential evolution (SaDE), comprehensive learning particle swarm optimizer (CLPSO), and Covariance Matrix Adaptation Evolution Strategy (CMA-ES), are adopted to solve the formulated problem. The individual of the EAs is represented as the permutation of trains’ departure order in the disrupted station. The individual is decoded to a feasible schedule of trains using a rule-based method to allocate the running time in sections and dwell time in stations. For continuous space searching algorithms, the random key algorithm is used to obtain permutations from real vectors. Numerical experiments have been performed on 8 TTR instances. Experimental results demonstrate the superiority of SaDE in solving TTR.
Ultrasonic Inner Inspection of Crude Oil Pipeline Based on Bispectrum Dimension Reduction Method
Jian TANG, Guo-Xin ZHAO, Xiang-Dong JIAO, and Xue-Peng DING
The key technology of Ultrasonic inner inspection of crude oil pipeline is to obtain the residual thickness of pipeline wall by the analysis and processing of the ultrasonic echo signal. In order to solve the problem that the second-order statistics are easy to appear errors, bispectrum is proposed to process the echo signal with the least amount of computation in higher order statistics in this paper. Then bispectrum is projected into one-dimensional frequency space by the dimension reduction method, and the one-dimensional diagonal slice of bispectrum is extracted to analyse the characteristics of echo signal, which greatly improves the intuition of data processing. Experimental results show that the bispectrum dimension reduction method has high accuracy in processing ultrasonic echo signal, which is much better than the second-order statistics method. It is suitable for ultrasonic inner inspection of long distance crude oil pipeline.
Measurement of Femoral Neck and Leg Length in Total Hip Arthroplasty Based on Optical Positioning
Weibo NING, Jiaqi ZHU, Guijie ZHU, Hongjiang CHEN, Wenning HUANG, Jun HU, Yibiao RONG, Yuwei CAI, and Zhun FAN
In traditional total hip arthroplasty (THA), it is difficult to accurately measure the length of femoral neck when the replacement area is limited and deep. It may eventually lead to excessive difference in the length of two legs. This paper presents a method for measuring the length of femoral neck in THA based on optical positioning. During the operation, the end of the probe with a positioning ball was used to measure the length of the femoral neck in real time to assist surgeons in surgical decision-making. According to the comparison between the ideal length and the actual length, the femoral head prosthesis was reasonably selected for adjustment. As it is difficult to accurately and quickly measure the difference of two legs after the placement of prosthesis in traditional surgery, a spatial measurement method of medical anatomical points of two legs based on optical positioning is proposed. By measuring the length of the affected leg with a probe and comparing it with the length of the normal leg before operation, the feedback information of synchronous measurement is further verified. Experiments verify the feasibility of this method for the detection of leg length difference. The average error of these experimental measurements is within 1 mm.
A Complex Parameter Measurement Method of Metal Pipeline Using Tilt Angle Intersection
Shuang WANG and Xuefei MAO
This paper proposes an eddy current nondestructive measurement method for metal pipeline parameters, which can measure the pipeline thickness and conductivity simultaneously. In this paper, the tilt angle intersection of the relative impedance changes of the coil, which is little affected by the tilt angle, is used. Based on the analytic solution of eddy current field model of the pipeline excited by the coil placed arbitrarily outside the pipeline, the law of the tilt angle intersection with the change of the pipeline parameters is obtained and an inverse method is established which utilizes the relationship between the frequencies of two tilt angle intersection points and the pipeline parameters. It has been found that the method has high measurement accuracy and can avoid the error caused by the deflection of the coil in a small range.
Position Estimation Method Using Directional Amplitude Modulated Pulsed Light with Simulation Based on Real Environment Measurements
Seita SUKISAKI and Hajime NOBUHARA
We propose a position estimation method using directional amplitude-modulated pulsed light based on real-world measurements and their simulation as a position estimation method that can be used in small drones. The proposed method enables highly accurate position estimation in a real environment using commercially available LEDs and photodetectors.
Design and Realization of a Closed-Loop Constant Flow Rate Air Sampler Using Differential Pressure Sensor
Bojin SHANG, Yaping DAI, Xiaohan WANG, Junyi YUAN, and Zhiyang JIA
In order to improve the accuracy of detection of a certain pollutant in the air, a digital air sampler based on flow rate feedback is designed and realized. Compared with the previous generation air sampler, orifice plate is used as basic measurement mechanism, instead of float flowmeter. A differential pressure sensor based on thermal micro-flow measurement is used to measure the pressure difference of the orifice plate and calculate the flow rate. This air sampler is designed as a closed-loop system and the flow rate is measured digitally. Experiments show that the accuracy of the air sampler meets the needs of the client.
Hydration and Dehydration Processes of Lactose Monohydrate Studied by THz Time Domain Spectroscopy
Muhammad Adnan ALVI, Zhaohui ZHANG, Xiaoyan ZHAO, Yang YU, Tianyao ZHANG, and Jawad ASLAM
Terahertz spectroscopy is now extensively employed to distinguish different hydrate systems and physical characterization of pharmaceutical drug materials. In the present work, the absorption spectra of terahertz radiation is used to investigate the effect of heating process on the release of the bounding H2O molecules present in α-Lactose monohydrate. Distinctive THz absorption spectra at various heating times were observed. The THz absorption spectra of α-lactose monohydrate and anhydrous α-lactose exhibit evident differences. The pure α-lactose monohydrate has clear absorption peaks at 0.53, 1.05, 1.11, 1.33, and 1.56 THz and a small peak at 0.8 THz. The complete dehydration of α-lactose monohydrate takes place at 145℃ (418 K) in 15 minutes. Moreover, Terahertz refractive index of α-lactose monohydrate decreases during dehydration process. Application of Beer-Lambert’s law to dehydration process of α-lactose monohydrate was also studied by comparing THz absorption spectra at various heating times. It was found that remaining water contents following various heating times in α-lactose monohydrate had exhibited linear relationship with absorption coefficient spectra recorded at 0.53 THz and 1.35 THz for α-lactose monohydrate at different dehydration times.
Digitization-Oriented Business Ethics Judgement Knowledge Structure and Application
Fenglin PENG
The massive data formed in the process of corporate ethics management poses a challenge for the high-efficient and accurate business ethics judgement. Therefore, this paper establishes a Digitization-Oriented Business Ethics Judgement Knowledge Structure (DOBEJKS), defines its elements including entities, activities, information and relationships, and designs an application methodology of using the DOBEJKS to make business ethics knowledge extraction, knowledge reasoning and knowledge judgement. It provides a reference for effectively carrying out the intelligent judgement of business ethics based on data.
A Basic Research to Develop a Method to Classify Game Logs and Analyze Them by Clusters
Akinobu SAKATA, Takamasa KIKUCHI, Ryuichi OKUMURA, Masaaki KUNIGAMI, Atsushi YOSHIKAWA, Masayuki YAMAMURA, and Takao TERANO
The objective of this study is to show that it is possible to classify a set of simulation logs of a gaming simulation into several clusters, and to reveal the characteristics of the gaming results by analyzing them in clusters. This research is a stepping stone toward the development of a new analysis method that is somewhere between the approaches used in previous research, which statistically analyze all simulation logs of a gaming simulation and the analysis approach that closely observes a specific simulation log. In the former approach, when the simulation logs are divided into several clusters by characteristics, the values of statistical indicators extracted from all simulation logs are not enough to fully grasp the characteristics of the gaming results. The latter approach requires a lot of time and effort to analyze, and can only tell us about a small portion of the simulation logs. The analysis method we aim to develop compensates for the shortcomings of both approaches. We collected a large number of logs in an experiment using a gaming simulation we developed, classified the log set, and checked the distribution of log features in each cluster. As a result, we showed that the distribution of feature values among clusters is different.
Web-Questionnaire-Based Method for Creating Corpus Containing a Large Number of Morphemes
Kazuaki SHIMA, Jinhua SHE, Yasunari OBUCHI, and Abdullah M. ILIYASU
This paper presents a method of using the Web questionnaire to create a corpus that makes natural utterances such as conversations with a human. Subjects were presented with situations involving the use of web questionnaires in conversations with a human caregiver. The objective was to create a corpus with a high level of naturalness in speech. The advantage of this method is that it is easier to implement than conventional Wizard of Oz (WOZ) or the interview-style-based corpus creation methods. On the other hand, a downside of the proposed method is that since the subjects answer via a PC (machine), only simple utterances might be collected. Therefore, we give a lecture to the subjects that they talk to a human. As a result, the naturalness of speech is increased despite the subject answering via PC (machine). To establish the performance of our method, we compare the morphemes of its corpus alongside those from the interview style-based corpus in a conventional method. The outcomes suggest that the proposed method could collect utterances with higher naturalness of speech.
Application of Neural Network Based on Long and Short Term Memory in Rumor Detection
Zhiyan WANG and Mingzhao LI
In this paper, we optimize the variable parameters in the long-term and short-term memory neural network through the slap swarm algorithm, so that it can more accurately adapt to the actual needs of rumor detection data. According to an input text segment, the short-term memory neural network can processes the Chinese word segmentation, and then convert it into binary number form by hot coding method, so as to map word vector. In the experiment, we design the model carefully, train it repeatedly in the word vector data set, and optimize the parameters of the model through the bottle ascidian optimization algorithm. The practice shows that it has strong applicability to rumor recognition.
Establishment of a Traceability Model of Fresh Milk Based on Blockchain
Dengmei JIANG, Jiandong FANG, and Yudong ZHAO
With the frequent occurrence of various food safety incidents in China, consumers’ trust in the quality and safety of food and the food supply chain has gradually declined. The food traceability system, as a storage system that can connect products from production to circulation and manage and query the traces of products, is of great significance to guarantee the quality and safety of various products. This article intends to build a blockchain traceability mechanism based on the theoretical analysis of blockchain technology, introduces the traceability model of fresh milk based on blockchain technology, and hopes to provide a reference for related research in blockchain traceability.
A Prediction Method of Driving Range Based on LSTM Combined with Causal Convolution
Zhe ZUO, Ning XU, Zhenyu ZHANG, Yuheng YAN, Weilong LV, and Ziyang XU
Accurate prediction of driving range of electric vehicles (EVs) is critically important to help optimize energy management. In this paper, a novel method to perform accurate driving range prediction is investigated using long short-term memory (LSTM) recurrent neural network combined with convolution layers. The data used in this paper are obtained from the National Monitoring and Management Platform for New energy vehicles. First, the data cleaning is applied to deal with abnormal values and missing values. Then, the datasets are constructed by the sliding window method. Finally, the LSTM model is built and the convolution layers are connected to the model. Dropout method is also introduced to prevent the model from overfitting. The results show that the proposed method can accurately predict the driving range, and the average RMSPE 0.099.
Design of Predictive Alarm System for Artificial Pancreas
Wenjing WU, Xiao YANG, and Dawei SHI
This paper designs a predictive alarm system for artificial pancreas, which judges whether the closed-loop control of artificial pancreas is in a safe state according to the information transmitted by CGM and insulin pump. It also grades threat degree of different indicators to human safety when various information changes (such as connection information of equipment, blood glucose history, and prediction data). According to the different levels, the system prompts the corresponding warning signal and takes measures to effectively avoid the risk of warning system. Based on the existing human blood glucose metabolism model and Sage-Husa adaptive model, an improved adaptive Kalman filter algorithm is designed to predict the blood glucose data of the model to obtain the blood glucose future blood glucose prediction value and improve the accuracy of multi-step blood glucose prediction firstly. And then simulate the prediction algorithm. Next, the prediction value is used as the information source of the prediction alarm system, and the prediction alarm system for artificial pancreas is established to increase the security control constraints, so as to effectively avoid risks. Finally, experiments are carried out on UVA/Pavoda T1DM hardware in the loop simulation platform to test and verify the effectiveness of the predictive alarm system.
Computer Vision-Based Monitoring and Safety Early Warning System for Gymnasiums
Bofan CHEN, Gengru CHEN, Zhaochen XIE, and Hongbin MA
In order to ensure that the security team can timely and effectively deal with the emergency and all the competitions of the 2022 Beijing Winter Olympic Games went on smoothly, this paper focuses on how to apply multi-person pose estimation to the security field with the support of target detection, pose feature classification and behavior recognition algorithm. The main approach is to combine OpenPose key pose estimation with SVM classifier to develop the monitoring and safety early warning system for the dangerous behaviors of the audience. By identifying the key joint points of the human body, extracting motion characteristics and making use of the trained classifier, the system can automatically pull the alarm when audience has abnormal behaviors such as throwing objects towards athletes, so that the security team can quickly deal with the emergency.
T2-4-4![]()
withdrawn
Research on Infrared Fault Warning Method of Hotline Tap Clamp of Substation Equipment Based on Hybrid Segmentation
Peifeng SHEN, Yang YANG, Yong LI, Lihua LI, Ting CHEN, and Ning YANG
The occurrence of substation equipment faults is usually associated with the heating of equipment components. Hotline tap clamps of substation equipment are important parts for carrying load currents and key parts for thermal fault potential. Therefore, a new hybrid early warning method for infrared faults of hotline tap clamp of substation equipment is proposed. A two-dimensional Otsu algorithm is used for coarse segmentation of infrared images to reduce the complexity of subsequent fine segmentation. Since the CV (Chan-Vese) model is not accurate enough for image segmentation with uneven grayscale. The differential information obtained by the Prewitt operator to detect the target edges is combined with CV model to improve the segmentation accuracy, and the fine segmentation of hotline tap clamp of substation equipment is achieved by the improved CV model. The temperature information is applied to the segmented images, and the fault warning of the hotline tap clamp of substation equipment is realized based on the relative temperature difference. The experimental results show that the method can improve the segmentation effect of infrared images and achieve the purpose of fault warning.
An XGB-Based Runtime Prediction Algorithm for Cloud Workflow Tasks
Jingwei HUANG, Huifang LI, Yizhu WANG, and Lingguo CUI
Cloud Computing and workflows provide a good deployment and execution environment for scientific applications, but effective scientific workflow management depends on the estimation of task execution time to a great extent. However, due to the diversity of task inputs, the heterogeneity of resources and the high dynamics of cloud environments, as the basis of task scheduling and resource allocation in cloud computing, the task runtime estimation still faces great challenges. In this paper, we propose an XGB (Extreme Gradient Boosting)-based workflow task runtime prediction method to mine the relationship between task runtime and its static and dynamic influencing factors through feature analysis to finally result in a prediction model for online use. To verify the effectiveness of our algorithm, a series of experiments are conducted over three real scientific workflow applications, and the experimental results show that the proposed method is superior to the existing algorithms in task runtime prediction accuracy.
PSO-SVM Optimized Kriging for Geological Modeling of Coal-Bearing Formation
Mingdi MA, Luefeng CHEN, Min LI, Min WU, Witold PEDRYCZ, and Kaoru HIROTA
The accuracy of kriging interpolation mainly depends on the selection of the variogram. In actual coal mine engineering, the number of drilling data in the same coal working face is small, and the amount of data that can be used as training is small, which leads to the low degree of fitting of the traditional variogram model. Therefore, this paper proposes an automatic fitting method for the variogram of the support vector regression machine based on particle swarm optimization (PSO-SVR). Using the powerful fitting ability of SVR when dealing with small samples and the powerful parameter optimization ability of PSO, the variogram can be reconstructed from actual data. Through the traditional kriging spherical model, PSO optimized spherical model (PSO-Spherical), and SVR model, a comparative analysis of the fitting correlation with the method in this paper is carried out. The experimental results show that the PSO-SVR reconstructed variogram has a higher fitting degree. The proposed method can provide support for coal seam thickness prediction and mining.
Analysis of the Influence of Inter-Generational Asset Inheritance on the Sustainability of Retirement Funds Using Social Simulation
Takamasa KIKUCHI and Hiroshi TAKAHASHI
In Japan, there has been great interest in life planning in pre- and post-retirement generations, and various policy simulations have been performed. However, few studies have analyzed the influence of intergenerational inheritance of assets on the sustainability of retirement funds. In this article, we performed clustering of the respondents’ attributes based on data obtained from individual questionnaires for those who plan to inherit their assets in the future. Based on the clustering results, we simulated the impact on the sustainability of retirement funds using our proposed simulation model of asset formation and withdrawal policies. The main findings are as follows. 1) For clusters with a low and high balance of financial assets, steady asset succession is an essential factor in increasing the sustainability of retirement funds. 2) It is imperative to properly manage the assets to be succeeded before asset succession is implemented.
Development of Ultrasonic Internal Detection Experimental System for Corrosion of Crude Oil Pipeline
Jian TANG, Guo-Xin ZHAO, Bo DAI, and Xue-Peng DING
Ultrasonic method is one of the important methods for internal corrosion detection of crude oil pipeline, and effective echo signal processing is its key technology. However, if the detection experiment is carried out on the in-service crude oil pipeline, the cost is very high, and it is almost impossible to study the echo signal processing technology. To solve this problem, an ultrasonic internal detection experimental system for crude oil pipeline corrosion is developed by simulating pipeline engineering detection environment, and the characteristics of multi-probe installation, working mode and instrument structure, etc. The system adopts the master-slave structure, 24 ultrasonic probes complete the transmission and reception of ultrasonic signals triggered by the synchronous clock signal, the detection board interacts with the computer through the network, and the offline analysis software automatically analyzes and processes the ultrasonic detection data by using 1.5 dimension spectrum estimation, so as to visually present the pipeline corrosion status and location. Finally, the effectiveness of the system is verified by the ultrasonic detection experiment of internal and external wall corrosion of Φ426 × 8 mm steel pipeline.
Design of Smart Campus System Based on Virtual Platform of Campus Card
Qichen HUANG, Yinru ZHU, Tongtong GAO, Yunji FENG, and Xuyang LIU
Campus card is an important part of the construction of supporting facilities in colleges and universities, but there are widespread problems such as limited application scenarios, inability to meet the personalized needs of users, inability to realize remote business processing, and difficulties to carry out mobile payment. To solve the problems of campus card system in Beijing Institute of Technology, we design a campus card electronic payment platform to solve these problems. In this paper we first discuss the application scenarios and values of campus card electronic platform for student academic management, campus mobile payment and smart campus construction. Furthermore, relying on emerging technologies such as mobile-end micro-applications and face recognition technology, a reliable, convenient, extensible and highly integrated virtual campus card platform is built to realize a convenient campus era so as to shorten the waiting time for every payment scenario in school.
Analysis and Agent Simulation of State Transition of COVID-19 Positive Cases in Tokyo, Japan
Yasufumi TAKAMA
This paper estimates the state transition of COVID-19 positive cases by analyzing the data about confirmed positive cases in Tokyo, Japan. An agent simulation using the estimated transition probabilities as its parameters is also proposed. While the prediction of the number of newly infected persons is important for recognizing the future risk of spreading infectious diseases, understanding the state transition after they are confirmed to be positive is also important for estimating the number of required ICUs, hotel rooms for isolation, etc. This paper classifies the state after being positive into “in hotel/home for isolation,” “in hospital with a mild state,” “in hospital with a severe state,” “recovered,” and “dead” and estimates the transition probabilities among those states from the data about confirmed positive cases in Tokyo, Japan. The proposed agent simulation predicts the number of persons in each state using the obtained transition probabilities and the distribution of the number of days before moving to the next state as its parameters. This paper shows the simulation results of predicting the situation from August to November 2020.
Multi-Scopic Simulation for Human-Robot Interactions Based on Multi-Objective Behavior Coordination
Kohei OSHIO, Kodai KANEKO, and Naoyuki KUBOTA
Recently, a multi-scopic approach has been applied to various research topics owing to the technological progress in computer science. For example, we can discuss a phenomenon from three different levels of macro-, meso-, and micro-scopic simulation. In the microscopic simulation, we can deal with the dynamics inside objects and internal states. In the mesoscopic simulation, we can deal with approximated dynamics between objects in a surrounding environment. In the macroscopic simulation, we can deal with spatiotemporal relationships between objects without dynamics. In this paper, we propose a multi-scopic simulation to discuss human-robot interactions. First, we discuss how to realize multi-scopic simulation for human-robot interactions. Next, we apply multi-objective behavior coordination to represent human and robot behaviors in mesoscopic simulation. Next, we apply the proposed method to navigation tasks of mobility support robots. Finally, we discuss the effectiveness of the proposed method through several simulation results.
Please download and complete the Registration Form here and send it to iwaciii@163.com before August 27, 2021.
If you can not download the registration form, please retry by changing your browser to others e.g., from MS IE to Firefox or MS Edge.
Registration Payment:
For Chinese
For Chinese participants, please transfer the registration fee to the following account; please also pay special attention to the subsequent important reminder notice:
账户信息:
单位名称 |
北京理工大学 |
单位开户行及账号 |
中国工商银行北京紫竹院支行 0200007609014435495 |
纳税人识别号 |
12100000400009127B |
单位地址 |
北京市海淀区中关村南大街5号 |
特别提醒:
1. 请务必在汇款或转账时填写附言,格式为:iwaciii +文章编号+作者姓名(中文);
2. 作者将汇款/转账回执单扫描件、付款人手机号、发票抬头(务必核实准确)、邮递地址和邮编(如需邮寄发票)发送至邮箱 iwaciii@163.com;邮件标题格式:文章编号+回执信息;
3. 请在转账/汇款时留出银行转账时间,以保证在2021年8月27号前转账汇款到账;
For Japanese
Since it may bring some difficulties to transfer registration fee from Japan to Beijing by using international bank transfer, we would like to recommend participants living in Japan to pay the registration fee (in Japanese yen) to the following account
みずほ銀行 大岡山支店(支店番号145)
普通口座 1825115
名義 ヒロタケンキュウシツダイヒョウヒロタカオル
Please note that
1) Money transfer charge should be paid by participants,
2) Remitter's name should be the participants name (in the case if other name is used, please inform the name and the date to conference secretary by e-mail).
For Other Foreigners
If you can attend the conference IWACIII 2021 during Oct. 31-Nov. 3, 2021 at Beijing, China, you can pay by Chinese money cash only (no credit card service) on site.
If you have any further questions about the registration and payment, please contact Miss Rongli Li (Email: iwaciii@163.com ; Office Tel.: 86-10-68917913) .
Conference Venue: International Center of Education and Exchange of Beijing Institute of Technology<北京理工大学国际教育交流中心>
Address: No. 66, West Beisanhuan Road, Haidian District, Beijing, China<北三环西路66号(近北京理工大学)>
Conference Rooms

Meeting Room 1 Meeting Room 2

Meeting Room 3 Meeting Room 4

Meeting Room 5 Meeting Room 6

International Center of Education and Exchange of Beijing Institute of Technology
Tel: 010-68945616/15811159377 Fax: 010-68945650
Address: No. 66, West Beisanhuan Road, Haidian District, Beijing, China
Price List
| Room Type |
Conf. Price |
| Deluxe Suite |
RMB 980 |
| Business Suite (A) | RMB 700 |
| Business Suite (B) | RMB 600 |
| Business Standard Room |
RMB 450 |
| Twin Room | RMB 450 |
| Standard Room | RMB 450 |
| Single Room | RMB 320 |
Part 1: For Guests who arrive at the Beijing Capital International Airport
[Airport Express and Beijing Subway], [Airport Shuttle], [Airport Taxi]
Part 2: For Guests who arrive at the Railway Stations
[Beijing South Railway Station], [Beijing West Railway Station], [Beijing Railway Station]
Part 1: For Guests who arrive at the Beijing Capital International Airport
Oversea guests on arrival may depart from Terminal 3 of the Beijing Capital International Airport to the Conference Venue (China Hall of Science and Technology, Fuxing Road #3, Haidian District) or neighboring hotels by airport shuttle, taxi or subway.
The inner map of the Beijing Capital International Airport can be found at the website http://en.bcia.com.cn/.
1. Airport Express and Beijing Subway (Suggested!)
The most convenient subway route is marked in the following map.

The total cost for the travel by subway is about 30 RMB with nearly an hour's journey.
Operation period: 6:20—22:30
Take the Airport Express at Terminal 3, and only two transfers are needed. The first is at the DongZhiMen Station (东直门), transferring from Airport Express to Line 2 (FuXingMen Direction 复兴门方向). The second is at the JianGuoMen Station (建国门), transferring from Line 2 to Line 1 (PingGuoYuan Direction 苹果园方向). Get off at the MuXiDi station (木樨地) and walk out of the station by Exit A1. Then, you can go ahead and walk about 400 meters to reach the east gate of China Hall of Science and Technology after getting out of the station by Exit A1 (we will have volunteers at Exit A1 to guide you).

Buy tickets from the bus ticket offices at Gate No.8 or No.9 (Outside) on the 1st Floor of Terminal 3.
Scheme 1: Airport Shuttle Line 2 (Beijing Capital International Airport—Xidan) [in Chinese: 2号线,西单线]
Bus Route: T3 -- T2 -- T1 -- Yonghegong[RMB 25] -- Andingmen[RMB 25] -- Jishuitan [RMB 25] -- South of Xizhimen Bridge[RMB 30] -- Fuxingmen [RMB 30] (复兴门) -- South of Xidan Intersection [RMB 30].
Get off at the Fuxingmen Station (复兴门). Please let the bus driver remind you of the arrival at this station.
Price: 30 RMB
Time: about 1.5 hours if no traffic jam occurs.
Operation period: 7:00~24:00. Buses depart when fully seated, with an interval of no more than 30 minutes.
The position of the bus stop for debarkation can be found in the following map.
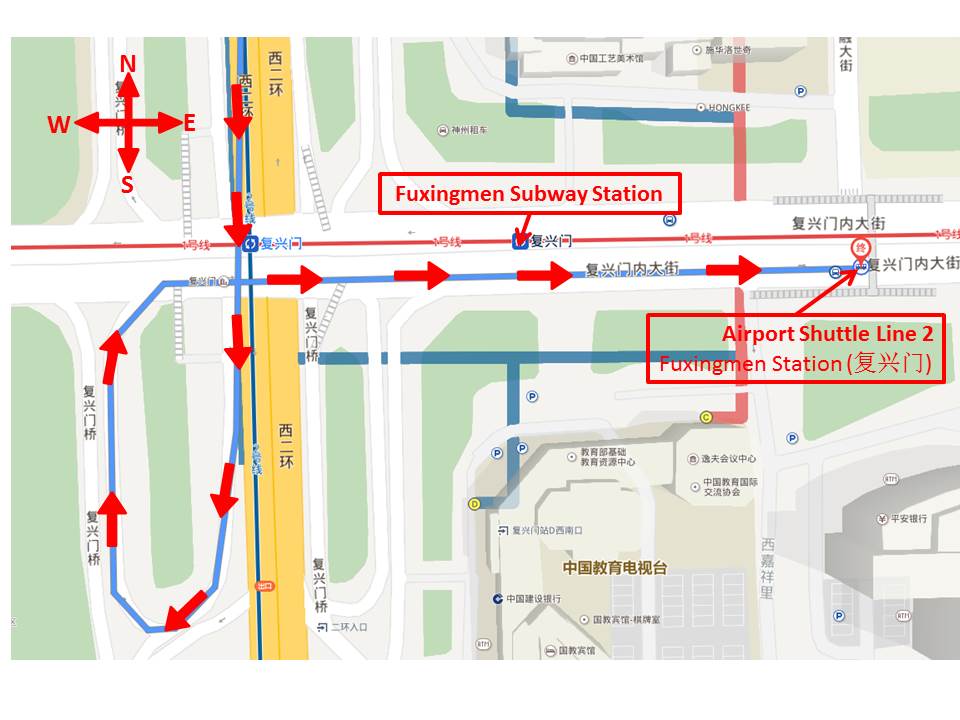
Then, you can take a taxi to reach the China Hall of Science and Technology (about 4 kilometers, about 16 RMB cost).
Scheme 2: Airport Shuttle Line 2 [Night Bus] (Beijing Capital International Airport—Xidan) [in Chinese: 2号线,西单线]
Bus Route: T3 -- T2 -- T1 -- Sanyuanqiao[RMB 20] -- Dongzhimen Transport Hub[RMB 30] -- Dongsishitiao Bridge[RMB 30] -- Chaoyangmen[RMB 30] -- Yabaolu[RMB 30] -- Beijing Railway Station[RMB 30] -- Beijing International Hotel[RMB 30] -- Xidan [RMB 30] (西单).
Get off at the Xidan Station (西单). Please let the bus driver remind you of the arrival at this station.
Price: 30 RMB
Time: about 1.5 hours if no traffic jam occurs.
Operation period: from 24:00 to the last domestic arrival of the day. Buses depart when fully seated, with an interval of no more than 30 minutes.
The position of the bus stop for debarkation can be found in the following map.

Then, you can take a taxi to reach China Hall of Science and Techonology (about 4 kilometers, about 16 RMB cost).
Scheme 3: Airport Shuttle Line 2 (Xidan—Beijing Capital International Airport) [in Chinese: 2号线,西单线]
Bus Route: Xidan (100 meters south of Exit J1 of Xidan Subway Station)[RMB 30] (西单) -- Chegongzhuang (Exit B, Chegongzhuang Subway Station) [RMB 30] --- Yonghegong (Exit B, Yonghegong Subway Station) [RMB 25] -- T2 -- T1 -- T3.
Price: 30 RMB
Time: about 1.5 hours if no traffic jam occurs.
Operation period: 5:10~21:00. Buses depart when fully seated, with an interval of no more than 30 minutes.
The position of the bus stop for boarding can be found in the following map.

You can take a taxi to reach the bus stop for boarding (about 4 kilometers, about 16 RMB cost).
Please let the taxi driver clearly know your destination. The conference venue is located at the Fuxing Road #3 (复兴路3号), Haidian District (海淀区). The journey is about 35 km and will take about 1 hour if no traffic jam occurs.
The charge of a taxi from Beijing Capital International Airport to the conference venue or neighboring hotels is about 110 RMB.
Part 2: For Guests who arrive at the Railway Stations
Guests on arrival may reach the Conference Venue (China Hall of Science and Techonology, Fuxing Road #3, Haidian District) or neighboring hotels by subway or taxi.
1. Beijing South Railway Station
Subway:
The most convenient subway route is marked in the following map.

The total cost for the travel by subway is about 4 RMB with nearly 20 minutes’ journey.
Operation period: 5:15—23:00.
Taxi:
Please let the taxi driver clearly know your destination. The conference venue is located at the Fuxing Road #3 (复兴路3号), Haidian District (海淀区). The journey is about 10 km and will take about 20 minutes if no traffic jam occurs.
The charge of a taxi from Beijing South Railway Station to the conference venue or neighboring hotels is about 30 RMB.
2. Beijing West Railway Station
Subway:
The most convenient subway route is marked in the following map.

The total cost for the travel by subway is about 3 RMB with nearly 10 minutes’ journey.
Operation period: 5:40—23:30.
Taxi:
Please let the taxi driver clearly know your destination. The conference venue is located at the Fuxing Road #3 (复兴路3号), Haidian District (海淀区). The journey is about 2.5 km and will take about 10 minutes if no traffic jam occurs.
The charge of a taxi from Beijing West Railway Station to the conference venue or neighboring hotels is about 13 RMB.
Subway:
The most convenient subway route is marked in the following map.

The total cost for the travel by subway is about 4 RMB with nearly 20 minutes’ journey.
Operation period: 5:15—22:30.
Taxi:
Please let the taxi driver clearly know your destination. The conference venue is located at the Fuxing Road #3 (复兴路3号), Haidian District (海淀区). The journey is about 9 km and will take about 30 minutes if no traffic jam occurs.
The charge of a taxi from Beijing Railway Station to the conference venue or neighboring hotels is about 30 RMB.
Badaling Great Wall


The Great Wall is a must for a China tour, while Badaling is a must for a Great Wall tour. Badaling Great Wall in Beijing is the best-preserved and most complete section among the various, hence the most popular, even among world leaders. You should visit it at least once in your life.
Beijing Summer Palace




Situated in the Haidian District northwest of Beijing, Summer Palace is 9 miles (15 kilometers) from the downtown area. Being the largest and most well-preserved royal park in China, it greatly influences Chinese horticulture and landscape with its famous natural views and cultural interests, which also has long been recognized as 'The Museum of Royal Gardens'.
Inquiry: IWACIII 2021 secretariat, Miss Rongli Li








copyright@ IWACIII 2021 . Beijing Institute of Technology
